
MACS-Module (MACS = Multi Achs Controller System) regeln autark das hochdynamische Positionieren und Synchronisieren von bis zu 32 Achsen von Servo- und Asynchronmotoren oder steuern autark Kleingeräte. Bevorzugt kommen die Steuergeräte da zum Einsatz, wo SPS-Lösungen zu teuer sind oder nicht ihre spezifischen Anforderungen erfüllen. Mit der neuen MACS6-Generation bringt maxon zwei kompakte Steuerungen auf dem Markt und setzt neue Maßstäbe:
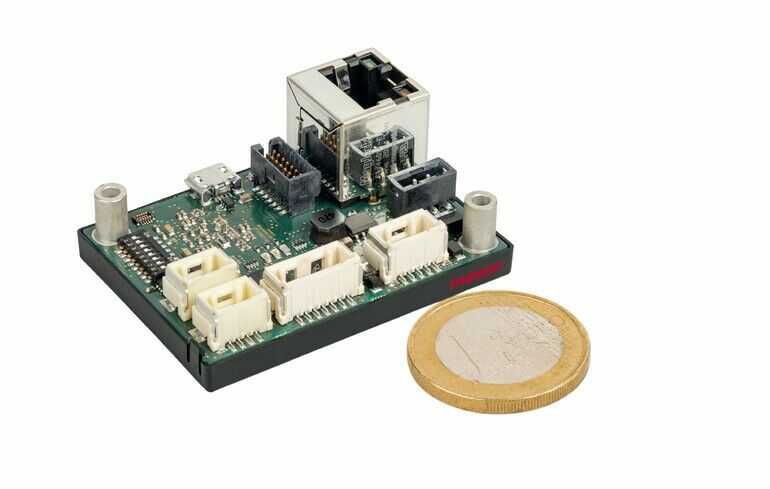
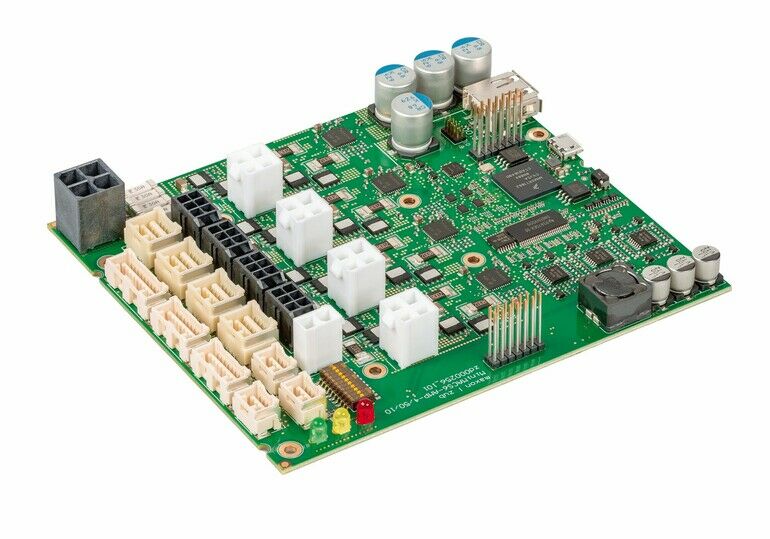
Die MiniMACS6-AMP-4 ist die wirtschaftliche Lösung, um bis zu sechs bürstenbehaftete oder bis zu vier bürstenlosen Motoren dynamisch und präzise zu bewegen. Die Steuerung ist sehr kompakt, programmierbar und verfügt über integrierte Endstufen. Positions-Feedback oder Master-Signale werden mittels inkrementellen Encoder-Eingängen eingelesen. Optional lassen sich Sin/Cos-Encoder oder SSI-Encoder anschließen. Eine Reihe von digitalen Ein- und Ausgängen verarbeiten Sensor-Signale und steuern Aktuatoren. Die Anzahl der Ein-/Ausgänge kann leicht durch ein CANopen I/O-Modul erweitert werden. Weiter verfügt diese Steuerung über zwei CAN- und eine USB-Schnittstelle, welche die Anbindung an ein übergeordnetes System ermöglicht. Optional können auch andere industrielle Bussysteme wie Ethercat eingebunden werden. Die MicroMACS6 hingegen hat keine Endstufen, ist aber laut Hersteller eine der kompaktesten Mehrachssteuerung auf dem Markt. Außerdem verfügt der Controller erstmals über eine BLE (Bluetooth Low Energy) Aufsteckoption.
Steuerung für autarke Roboter oder Shuttle-Systeme
Eine effiziente Motion-Control-Programmiersprache (C-Sprache) ermöglicht es, die MiniMACS6-AMP-4 auch als Standalone-Lösung zu betreiben (ohne übergeordneten PC oder SPS). Mit ihrer Größe eignet sich die Steuerung für Systementwickler, welche autarke Roboter oder Shuttle-Systeme, wie z.B. die Lagerkommissionierung, designen. Ein Vorteil ist die Antriebskomplettlösung mit integrierten Endstufen. Der größte Mehrwert ist die freie Programmierung auf C-Basis mit leistungsstarken Motion-Control-Befehlen inklusive Unterstützung von hierarchischen State Machines mittels lizenzfreier Automatisierungssoftware ApossIDE. Motion-Control-Funktionalität, Servo-Endstufen, Encoder-Eingänge, Bus-Schnittstellen und Entwicklungstools sind inklusive.
Mechatronische Antriebssysteme
Komplexe mechatronische Antriebssysteme funktionieren nur, wenn alle Komponenten von höchster Qualität und perfekt aufeinander abgestimmt sind. maxon entwickelt und produziert nicht nur DC- und BLDC-Motoren, Getriebe und Sensoren, sondern auch Multi-Axis Motion Controller. So sind die Schweizer auch in der Lage, die hochwertigen Antriebskomponenten in einem mechatronischen System zu vereinen. Die Vorteile: Ein kompaktes Design, kundenspezifisch konfigurierte Komponenten und die Garantie, das Maximum an Leistung aus dem Antriebssystem herauszuholen.
Kompakte Mehrachssteuerung mit Bluetooth-Low-Energy-Option
Die MicroMACS6 bietet harte Echtzeit-Fähigkeit bei der Mehrachs-Synchronisierung trotz ihrer ultrakompakten Größe. Mit MicroMACS6 wird der Systemansatz von maxon weiterentwickelt. Diese Mehrachssteuerung ist auf das nötigste redimensioniert, ohne an gewohnten MACS-Funktionalitäten einzubüßen. Der frei programmierbare Motion Controller ohne Endstufen, steuert autark eine bis sechs Achsen und verfügt über zwei unabhängige CAN-Schnittstellen sowie eine Ethernet-Schnittstelle. Die Steuerung lässt sich als CANopen-Master zur Kommandierung eines Epos Motor Controller einsetzen. Escon-Controller können über PWM-Ausgänge kommandiert werden. Entwickelt wurde die Steuerung für Anwendungen, die kompakte Systeme erfordern wie es bei autonomen Shuttles, im Gerätebau oder bei subautonomen Systemen der Fall ist, und wo mehrere Achsen involviert sind. Die Beweggründe für den Einsatz der MicroMACS6-Steuerung in eine bestehende Lösung sind unterschiedlich: Einerseits, weil es eine Motionlogik benötigt, um eine bestehende übergeordnete Steuerung zu entlasten oder komplett zu ersetzen. Andererseits, weil zusätzliche Motion-Funktionen integriert werden sollen. Ein Beispiel aus der Praxis sind das autarke repetitive Abarbeiten von Fahrprofilen bei Labor- und Testanwendungen inklusive Datenprotokollierung, aber auch komplexe ruckoptimierte, synchronisierte Bewegungen mehrerer Achsen oder komplette Kinematik-Module für Scara oder Delta-Robotik Anwendungen.
Grundsätzlich wird die Steuerung dort eingesetzt, wo zwei oder mehr Achsen synchron zusammenarbeiten oder mehrere Achsen positioniert werden, und der reine Achsantrieb nicht mehr reicht. Der Vorteil gegenüber einem Raspberry-Pi oder einer Arduino- Lösung ist die harte Echtzeit. Also die Fähigkeit, auf ein Ereignis innerhalb des vorgegebenen Zeitrahmens garantiert zu reagieren. Genau diese Echtzeit-Fähigkeit ist entscheidend, wenn mehrere Achsen miteinander performant eine Aufgabe erfüllen.
Ein spannendes Anwendungsbeispiel ist das nach seinem japanischen Erfinder Katsuhisa Furuta benannte Pendel. Es ist einfach aufgebaut. Ein angetriebener Arm rotiert horizontal und ein Pendel, das an diesem Arm befestigt ist, rotiert vertikal. Was Kopfzerbrechen bereitet, ist die theoretische Modellierung und die Anforderung an eine Stabilisierung dieser Bewegungen. Beim Furuta-Pendel ergeben sich zwei Größen: Die Ausrichtung des Rotationsgelenkes sowie die des Pendels, die sich regeln lassen. Das Pendel wird in der aufrechten, instabilen Lage geregelt – der Arm nimmt dabei eine beliebige Position ein. Da es sich um ein nichtlineares und instabiles System handelt, eignet es sich zum Experimentieren, um bestehende Regelalgorithmen zu überprüfen und neue Berechnungsverfahren zu entwickeln. Hierbei werden oft Lösungsansätze von Forschungsbereichen wie Robotik, Kontrolltheorie und rechnergestützte Regelung miteinander kombiniert.
Den richtigen Regler finden
Ein geeigneter Regler kann mittels verschiedener Entwurfsstrategien realisiert werden. Passende Regler-Strukturen für ein inverses Pendel sind: PID, LQR, Fuzzy oder selbstlernende neuronale Regler. Das physikalische System mit mehreren Freiheitsgraden kann mathematisch modelliert werden. Für das Aufschwingen des Pendels aus der Ruhelage (Null-Lage) sind nichtlineare Herangehensweisen wie Energieansätze erforderlich. Mit Hilfe der mathematischen Beschreibung wird anschließend ein passender Regler entworfen. Dieser Regler kann für echtzeitfähige Systeme angenähert beziehungsweise diskretisiert und auf eine Steuerung wie die MiniMACS6-AMP-4/50/10 übertragen werden. Er ist der stabilisierende Regler für das rotierende inverse Pendel. Damit lassen sich komplexe Bewegungsmuster mit einfachen Befehlen ausführen, beispielsweise bei einem ruckfreiem aufsynchronisieren auf eine drehende Masterachse. Die Vorteile der Mehrachssteuerung des MiniMACS6-AMP-4/50/10:
- übernimmt die Master-Funktion; keine über- geordnete Steuerung notwendig
- lizenzfreie Motion-Control-Funktionalität inklusive
- kompakte Antriebslösung mit integrierten Endstufen
Mittels der lizenzfreien Automatisierungssoftware ApossIDE (Integrated Development Environment) lassen sich Positionier- und Synchronisationsaufgaben mit einfachen Befehlen aufsetzen oder eigene Regelalgorithmen via C-Sprache (ApossC) ausführen. (jg)
Mehr Informationen zur Intelligenten Steuerungstechnik von maxon:
 Fabian Vogel, Geschäftsführer maxon-zub: „maxon entwickelt und produziert seit Jahrzehnten Antriebskomponenten und mechatronische Systeme.“
Fabian Vogel, Geschäftsführer maxon-zub: „maxon entwickelt und produziert seit Jahrzehnten Antriebskomponenten und mechatronische Systeme.“Bild: maxon
„Das Systemgeschäft gewinnt an Bedeutung und wird komplexer“
Sie ergänzen sich perfekt: Als maxon 2017 die zum Verkauf ausgeschriebene zub übernimmt, gewinnen die Kunden beider Unternehmen. Einerseits profitieren sie von Komplettlösungen, Expertise und einem weltweiten Vertriebsnetz, andererseits von einer erweiterten Produktpalette. maxon synchronisiert die Entwicklung der gesamtheitlichen Motion-Control-Lösungen mit dem Spezialisten zub. Ein erstes Produkt dieser Zusammenarbeit ist die gemeinsam entwickelte MicroMACS6. So bietet maxon ihren Kunden Systemlösungen aus einer Hand, was weniger Schnittstellen, gebündeltes Know-how sowie effiziente Entwicklungszeiten bedeutet.
Warum entwickelt die maxon-Gruppe programmierbare Master Controller?
Fabian Vogel: maxon entwickelt und produziert seit Jahrzehnten Antriebskomponenten und mechatronische Systeme. Das Systemgeschäft gewinnt aber zunehmend an Bedeutung und wird komplexer. Eine entscheidende Komponente für diese Systemlösungen decken die programmierbaren MACS-Controller ab. Die Verwendung der Master Controller (MACS) ist vielfältig: Praxisbeispiele sind das autarke repetitive Abarbeiten von Fahrprofilen, aber auch komplexe synchronisierte Bewegungen mehrerer Achsen oder komplette Kinematik-Module für Scara- oder Delta-Robotik-Anwendungen
Was zeichnet die MicroMACS6 aus?
Vogel: Der programmierbare Motion Controller ohne Endstufen steuert autark eine Achse bis sechs Achsen und lässt sich mit Epos4-Positioniersteuerungen und Escon-Servocontrollern kombinieren. Durch seine Kompaktheit und das attraktive Preis-Leistungs-Verhältnis ist er wie gemacht für den Gerätebau. Die MiniMACS6-AMP4 hat im Unterschied zur MicroMACS6 vier integrierte Endstufen.
Wer kann die MicroMACS6 programmieren?
Vogel: Alle, die mit C-Sprache Programmiererfahrung haben. Um den Einstieg zu vereinfachen, bieten wir ein kostenloses Software-Development-Kit an. Dieses Entwicklungspaket enthält nützliche Funktionen und einige Programmbeispiele.
Wo zieht maxon die Grenzen, als Systemprovider wahrgenommen zu werden?
Vogel: Bei der Applikationsentwicklung stellen sich automatisch Fragen, die die gesamte Architektur betreffen. Gibt es eine übergeordnete Steuerung? Wenn ja, welche und über welche Schnittstellen wird was kommuniziert? Was sind die Anforderungen an die Echtzeitfähigkeit? Wie viele Achsen müssen zusammenarbeiten und in welcher Form? Welche Anforderungen gibt es an die Dynamik? In welcher Präzision? Und schon sind wir mitten im Systemdenken. Wichtig ist die Abgrenzung: maxon sieht sich als Systemexperte für Antriebe.







{kind=link}