
Der heutige Einsatz von bürstenlosen Mikromotoren beschränkt sich weitgehend auf High-Tech-Applikationen. Dies rührt unter anderem daher, daß der „konventionelle“ bürstenbehaftete Gleichstrommotor trotz gewisser Nachteile Verschleiß, Korrosionsanfälligkeit, viele mech. Einzelteile in der Konsumgüterindustrie und in der Telekommunikation sehr gut eingeführt ist. Der Vorteil dieser Motoren ist allerdings, daß sie mit einer Gleichspannung gespeist werden können, wie sie in Geräten der genannten Kategorien nun eben vorhanden ist.
Die Autoren: Albert Birkicht, Business Unit Manager, und Axel Drapp, Applikations-Ing., RMB SA, CH-Biel
Aufgrund der geringen Abmessungen der hier vorgestellten bürstenlosen smoovy Motoren ist es recht schwierig, mit der gängigen Methode der Rotorpositionserkennung über die induzierte Spannung zu arbeiten. Die Spuleninduktivitäten sind einfach zu klein, um mit vernünftigem Aufwand im unteren Drehzahlbereich Resultate zu erhalten. Das hat zur Folge, daß man in diesem Bereich dazu verdammt war, open-loop zu fahren, also auf das Feedback zu verzichten. Dies bringt natürlich für gewisse Anwendungen Nachteile mit sich. Insbesondere in medizintechnischen Applikationen können diese oft nicht akzeptiert werden.
Bürstenlos als Ziel
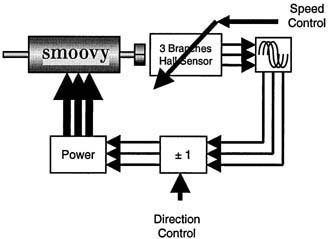
Ein erster Schritt, um den Übergang vom bürstenbehafteten zum bürstenlosen Motor zu vereinfachen, ist der neukonzipierte smoovy electronic brush-Motor. Dort wird über einen kleinen Sensor die Rotorposition gemessen, die Signale werden verstärkt und dem Motor derartig wieder zugeführt, daß der Kommutierungswinkel stets beim optimalen Wert von 90° bleibt.
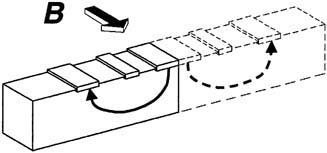
Das ist im Prinzip das gleiche, was auch der Bürstenmotor mit seiner Bürste-Kommutator- Anordnung macht – aber auf elektronischem Weg! Durch den patentierten Sensor, der nicht nur ein, sondern mehrere, der Spulenanzahl entsprechende, Signale liefert, ist ein einfacher (und integrierbarer) Aufbau der Elektronik möglich. Das Prinzip des „Vertikalen Hall Sensors”, bei dem ein Teil des „in der Tiefe“ des Chip laufenden Stroms nach oben auf die Sensorfläche gelenkt wird, ist bildlich gezeigt.
Vertikaler Hallsensor
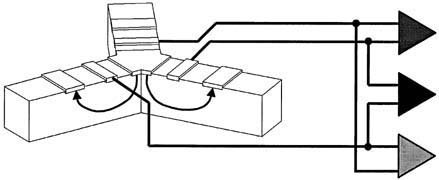
Durch Kombination von drei dieser Basiseinheiten erhält man den von RMB patentierten dreiarmigen vertikalen Hall-Sensor. Die Präzision der Anordnung wird dabei nicht wie bei anderen Konfigurationen durch die Montage von einzelnen Sensoren bestimmt, sondern mit der Genauigkeit der Chipfertigung (im Sub-Mikrometer-Bereich). Dies erlaubt es, weit höhere Auflösungen zu erzielen, als bisher möglich war. Der grundsätzliche Unterschied ist vor allem in der Qualität und Art der Signale zu sehen, die diese Art von Hallsensor liefert. Während konventionelle Hallsensoren normalerweise lediglich als Schalter eingesetzt werden, um zwischen zwei Zuständen zu unterscheiden, geht es hier um ein völlig anderes Prinzip. Die am Sensorausgang zur Verfügung stehenden Signale sind im Prinzip identisch zu dem, was man sich idealerweise am Motoreingang wünscht: 3 Sinussignale mit 120° Phasenverschiebung. Diese Art Hallsensor ist also eher mit einem Resolver zu vergleichen als mit herkömmlichen Hallsensoren. Dieser Aspekt muß beim Entwickeln von Applikationen unbedingt berücksichtigt werden.
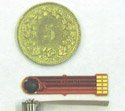
Das Magnetfeld, das durch diesen Sensor gemessen wird, wird in unserem Fall durch einen zusätzlichen Magneten erzeugt. Im Bild zu erkennen ist die Rückseite des Motors mit dem winzigen Sensor-Magneten, der auf der Welle montiert ist.
Notwendige Elektronik
Um alle Vorteile dieser neuen, faszinierenden Sensortechnologie zu nutzen, muß man natürlich eine Elektronik parat haben, die in der Lage ist, dies auch für den Anwender umzusetzen. Ein System, bestehend aus smoovy Mikroantrieb, Hallsensor und passender Elektronik, bietet dem Anwender zahlreiche Vorteile wie geringer Stromverbrauch, kaum Erwärmung im Betrieb, hohe Positioniergenauigkeit, Regelung von Drehzahl, Drehmoment oder anderen Leistungsparametern usw.
Die Elektronik ist natürlich ebenfalls weiter miniaturisierbar. Einen vorläufigen, noch nicht integrierten Aufbau zeigt unsere Abbildung.
Durch die Verwendung von Sinussignalen entstehen auch weniger Oberwellen, die unter Umständen hörbar wären und die EMV beeinflussen können.
Bei der Verwendung des Sensors mit einem Getriebemotor wird der kleinste Motorschritt noch einmal durch das Übersetzungsverhältnis des Getriebes geteilt, so daß man ohne weiteres zu Auflösungen im Bereich von Winkelsekunden kommt.
Die in der Vorgabe für die Entwicklung des Sensors geforderte Genauigkeit für den kleinsten auflösbaren Schritt von ±2° wurde in den Tests unterschritten; bei Referenzmessungen wurden Werte von 0,1° erreicht.
Der Sensor an sich ist in ein Gehäuse mit 5,8 mm Durchmesser und 4 mm Länge eingebaut, welches ein weiteres Modul der smoovy-Baureihe ist: Der Benutzer bestimmt, was er braucht und setzt sich eine für ihn optimale Kombination aus Motor, Getriebe und Sensor zusammen. Mit dem ebenfalls erhältlichen Linearaktuator kommt man zu Servoanwendungen, die „von der Stange“ bereits in den Mikrometer-Bereich hinein positionieren können.
Da heutzutage kaum noch ein Gerät, sei es im Beruf oder im täglichen Umgang, ohne Elektronik auskommt, verschwindet der scheinbare Nachteil der zusätzlich benötigten Kommutierungselektronik von bürstenlosen Motoren mehr und mehr. Manche Aufgabe, für die man bei einem Gleichstrommotor schon spezielle Tricks anwenden muß, läßt sich mit einem bürstenlosen Motor wesentlich einfacher erledigen.
Anwendungs-beispiele
In zahlreichen Applikationen ergeben sich damit neue Möglichkeiten. In der Medizintechnik möchte man bei Medikamentenpumpen sichergehen, daß bereits der erste Motorschritt nach dem Einschalten mit der geforderten Präzision in die richtige Richtung geht – mit dem smoovy Hall-Sensor Modul kein Problem mehr, da die Elektronik die Positionserkennung bereits vornehmen kann, bevor sich der Motor in Bewegung setzt. In optischen Anwendungen ist oftmals extrem genaue Geschwindigkeitsregelung auch innerhalb einer Umdrehung gesucht. Auch hier kann man durch das hohe Auflösungsvermögen des Hallsensors heute Lösungen anbieten.
Ausführliche Informationen
Mikromotoren
KEM 590
Miniatur-Wälzlager
KEM 591
Internet
Unsere Whitepaper-Empfehlung

Whitepaper Sealing Plugs: So verschließen Sie Hilfsbohrungen in Motoren, Pumpen, Hydraulikaggregaten oder Werkzeugmaschinen dauerhaft und absolut dicht. Leichte Installation, niedrige Kosten. Für Betriebsdrücke bis 500 bar.
Teilen:







{kind=link}