


Inhaltsverzeichnis
1. Einfache Programmierung mit vorkonfigurierten Softwarebausteinen
2. Gemeinsames Koordinatensystem stellt die Basis
3. Visualisierung verdeutlicht Abläufe vorab
4. Pick&Place lässt sich einfach programmieren
5. Pick-and-Place im Team
Beim Zusammenspiel von Mechatronik, Vision-Systemen und Antrieben mit Robotern in einer Produktionsmaschine zählt vor allem eines: die reibungslose Synchronisation aller Beteiligten im Bereich weniger Mikrosekunden. Damit Maschinen und Robotik nahtlos zusammen arbeiten, hat die B&R Industrial Automation GmbH, Eggelsberg, das Konzept der Maschinenzentrierten Robotik (Machine-Centric Robotics – MCR) entwickelt. Robotik und Maschinensteuerung verschmelzen dabei zu einer einheitlichen Architektur.

Bild: B&R
„Mit unseren Lösungen macht es für den Maschinenentwickler in Zukunft keinen Unterschied mehr, ob er eine Einzelachse oder einen Roboter in seine Maschine implementiert“, sagt Sebastian Brandstetter, Produktmanager Machine-Centric Robotics bei B&R. Hersteller können so dem Trend zur individualisierten Massenproduktion folgen und ihre Prozesse bis hin zur Losgröße 1 optimieren. Zudem benötigen sie nur noch eine Steuerung und ein Engineeringsystem für Entwicklung, Diagnose und Wartung. „Damit wird die Einstiegshürde in die Robotik deutlich gesenkt.“
Einfache Programmierung mit vorkonfigurierten Softwarebausteinen
Als integraler Bestandteil der Maschinenapplikation werden Roboter wie jede andere Automatisierungskomponente in der B&R-Entwicklungsumgebung Automation Studio programmiert und simuliert. Die vorkonfigurierten Softwarebausteine mapp Robotics vereinfachen die Erstellung von Maschinenapplikationen mit Robotern weiter.
Entwickler können zudem auf neue Funktionen zurückgreifen, die das Zusammenspiel zwischen dem Transportsystem Acopostrak mit einzeln steuerbaren Shuttles und den Robotern mit geringem Programmieraufwand nach dem Low-Code/No-Code-Prinzip optimieren. Das Erlernen spezieller Roboterbefehle entfällt.
Gemeinsames Koordinatensystem stellt die Basis
Oberstes Ziel von B&R bei der Entwicklung der Engineering-Umgebung für die maschinenintegrierte Robotik war es, die Komplexität der Bewegungen und Abläufe, die sich aus dem mikrosekundengenauen Zusammenspiel von Roboterkinematik und Transportsystem ergeben, so weit wie möglich vor dem Anwender ‚zu verbergen‘.
Daher wird die gesamte Maschinenstruktur und -hierarchie in der Softwareapplikation abgebildet, wobei ein einziges übergeordnetes Koordinatensystem (Global Coordinate System, kurz GCS) für alle Komponenten verwendet wird. Abhängigkeiten und Hierarchien können auf diese Weise einfach konfiguriert, leicht verständlich visualisiert und auch zur Laufzeit geändert werden.
Visualisierung verdeutlicht Abläufe vorab
Das GCS wird beispielsweise auch für die Visualisierung von Prozessen verwendet. Wenn der Entwickler eine Anwendung erstellt, generiert der ‚Automation Studio Scene Viewer‘ automatisch eine Ansicht der kompletten Maschine, in der die Interaktionen zwischen Robotern, Shuttles und den zu handhabenden Produkten dargestellt werden. Dabei ist das GCS der gemeinsame Bezugspunkt und erleichtert dem Anwender die Konfiguration, da die Bewegungen der Roboter nur in Bezug auf ein bestimmtes Shuttle definiert werden müssen – die absolute Position des Shuttles in der Maschine muss nicht berücksichtigt werden.
Vorteile ergeben sich auch bei der Inbetriebnahme. Da alle Systeme – Shuttles, Roboter und Kameras – über das globale Koordinatensystem verbunden sind, lassen sich installationsbedingte Positionsabweichungen mit minimalem Aufwand kalibrieren. Verschiebt sich beispielsweise die Aufstellposition des Tracksystems um ein paar Zentimeter, wird dies automatisch in den Roboterbewegungen berücksichtigt. Wird ein anderes Werkzeug auf den Roboter montiert, bleiben dessen Bewegungen mit dem Shuttle synchron – und das ganz ohne manuelle Umprogrammierung.
Pick&Place lässt sich einfach programmieren
Neben der Verbesserung des Zusammenspiels von Tracksystem und Roboter hatte B&R auch das Ziel, die Leistung der Roboter selbst zu optimieren. „Anstatt mit konstanten Antriebswerten und fixen Arbeitsbereichen beim Pick&Place-Roboter zu arbeiten, bringen wir die Anpassungsfähigkeit der gesamten Maschine nun auch in den Pick&Place-Prozess“, fährt Brandstetter fort. „Die Lösung berücksichtigt bei der geometrischen Planung das dynamische Verhalten der Roboterhardware, so dass der Roboter-TCP (Tool Center Point) immer die optimale Bahn fährt.“ Dadurch kann der Durchsatz um bis zu 10 % gesteigert werden. Auch die Begrenzung des Jerks (sinngemäß Rucks, sprich die Änderung der Beschleunigung) und damit die Beschleunigung des Roboters wird automatisch an die aktuell transportierte Last angepasst, wodurch der Durchsatz um bis zu 20 bis 30 % gesteigert werden kann.
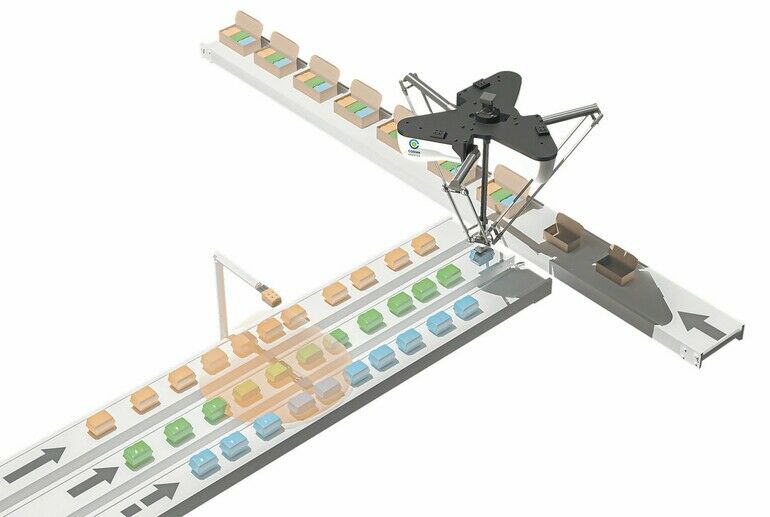
Mit den Funktionen ‚First Leaving Workspace‘ und ‚Distance to Process Point‘ wird dann die Pickstrategie automatisch optimiert. Die Position der zu greifenden Werkstücke auf dem Förderband wird über das vollständig in den Automatisierungsverbund integrierte Vision-System übermittelt. In Echtzeit wird entschieden, welches Teil in welcher Reihenfolge gegriffen wird. Ausschlaggebend für die Entscheidung ist, welches Produkt als nächstes den Arbeitsbereich des Roboters verlässt oder welches Teil einem frei definierbaren Bearbeitungspunkt am nächsten liegt. Dies ermöglicht eine maximale Auslastung des Roboters, indem sichergestellt wird, dass kein Produkt den Arbeitsbereich ungepickt verlassen kann. Die Bearbeitungsstrategie wird mit geringem Aufwand optimiert und die Pickrate deutlich erhöht.
Pick-and-Place im Team
Auch in Szenarien, in denen mehrere Pick&Place-Roboter eingesetzt werden, unterstützt die mapp-Robotics-Komponente für Pick&Place-Anwendungen den Konstrukteur. Integriert ist eine automatische Kollisionsvermeidung für Roboter mit überlappenden Arbeitsbereichen, so dass die Roboter auf kleinem Raum enger zusammenrücken können.
Übrigens: Eine neue Multi-Grip-Funktion steigert die Produktivität weiter. Sie ermöglicht komplexere Picksequenzen, indem mehrere Werkstücke gegriffen und an verschiedenen Stellen abgelegt werden können. Da sich die Last bei jedem Zyklus ändert, ist die dynamische Traglastanpassung in diesem Modus besonders wertvoll. (co)
Messe SPS 2023: Halle 7, Stände 114 und 206
Mehr zur Maschinenzentrierten Robotik (MCR)
Hier finden Sie mehr über:








{kind=link}