Blue Botics hat mit „ANT everywhere“ eine neue Produkterweiterung für seine ANT-Navigationsprodukte auf den Markt gebracht. Sie vereinfacht den Außeneinsatz von automatisierten Fahrzeugen. Der Einsatz im Freien stellt für die Hersteller von automatisierten Fahrzeugen traditionell eine Herausforderung dar. Dies liegt daran, dass im Freien in der Regel nur wenige dauerhafte „Merkmale“ sichtbar sind, die moderne mobile Roboter benötigen, um ihre genaue Position zu berechnen.
Installationen im Freien bislang teuer und individuell
Bisher haben Fahrzeughersteller dieses Problem entweder durch Ad-hoc-Navigationszusätze gelöst, indem sie ein GPS-System auf ein bestehendes Navigationsprodukt aufsetzten, oder durch zusätzliche Infrastruktur im Außenbereich, z. B. durch spezielle Masten mit Reflektoren. Infolgedessen waren die Installationen von FTS und AMR im Freien oft sehr individuell (und daher teuer) und komplexer und zeitaufwändiger als entsprechende Projekte in Gebäuden.
Lösung: Eine zusätzliche Datenquelle für die Navigation
ANT everywhere meistert diese Herausforderung, indem es eine zusätzliche Datenquelle für die Navigation hinzufügt: GNSS mit kinematischer Echtzeit-Positionierung (RTK). Das Ergebnis ist ein nahtloses Navigationssystem für den Innen- und Außenbereich, das FTS-Einsätze im Freien genauso robust und präzise macht wie solche in Innenräumen.
So funktioniert ANT everywhere
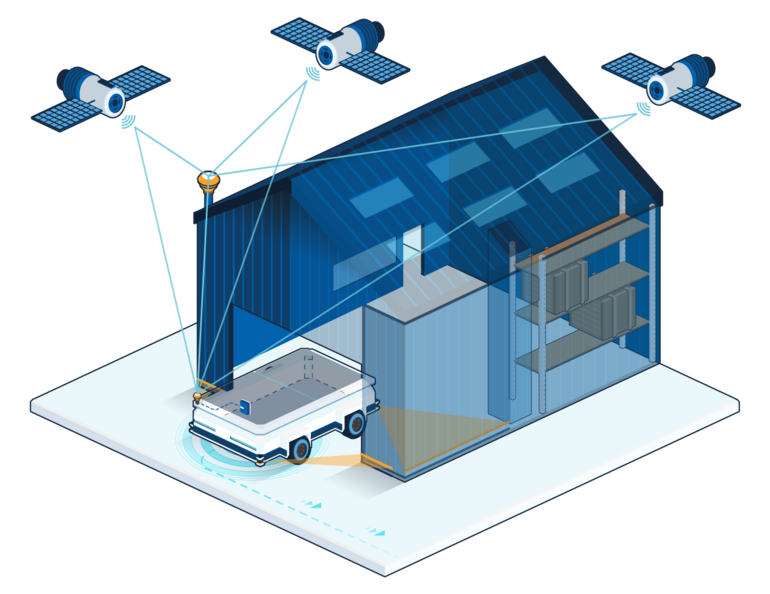
Wenn ein „ANT-driven“ Fahrzeug mit ANT everywhere aktiviert ist, verwendet sein Navigationsalgorithmus die Datenquelle, die zum jeweiligen Zeitpunkt am relevantesten ist:
o Innerhalb eines Gebäudes: Die ANT-Navigation verwendet die üblichen Daten der Odometrie, der Trägheitsmesseinheit (Gyroskop) und des Laserscanners, um die genaue Position des Fahrzeugs zu berechnen und die permanenten Merkmale in der Umgebung mit den in der integrierten Standortkarte gespeicherten Merkmalen abzugleichen.
o Beim Übergang in den Außenbereich, wo weniger Merkmale sichtbar sind, liefern die GNSS-Daten zusätzliche Positionsinformationen für ANT.
o Völlig außerhalb: Wenn weniger oder gar keine permanenten Merkmale sichtbar sind, wird den GNSS-Daten eine noch höhere Priorität eingeräumt.
Dank der Sensorfusion des Anbieters ist der Übergang zwischen Innen und Außen nahtlos.
Erste Installation am Flughafen in Barcelona
Ein mit ANT evrywhere ausgestattetes Fahrzeug hat vor kurzem einen erfolgreichen Proof-of-Concept-Test am Flughafen von Barcelona absolviert. Das Projekt war Teil einer gemeinsamen Initiative von Worldwide Flight Services und dem spanischen Flughafenbetreiber AENA, mit der der Einsatz autonomer Technologien auf spanischen Flughäfen validiert werden sollte. Es lief drei Monate lang und umfasste den Transport von Qatar Airways-Fracht zwischen dem Frachtlager von Qatar und dem BCN-Terminal 1 mit einer Gesamttransportzeit von 20 Minuten. Das verwendete Fahrzeug war ein 25-Tonnen-Simai-Schlepper-AGV des spanischen Herstellers Mowo. (kf)

Hier finden Sie mehr über:








{kind=link}