


Inhaltsverzeichnis
1. Ausstattung mit sicherer Sensorik
2. Grenzwerte für Stoß und Quetschung
3. Anpassung der Formgebung oder des Endeffektors
4. Messung der Kraft- und Druckwerte
Um über die Notwendigkeit eines Schutzzauns zu entscheiden, muss zunächst geklärt werden, ob und in welcher Weise der Mitarbeiter mit dem Roboter zusammenzuarbeiten hat. Soll der Zaun lediglich entfallen, damit ein einfacherer Zugang für Be- und Entladetätigkeiten geschaffen wird? Oder sind Bauteile gemeinsam mit dem Roboter zu montieren? Die Notwendigkeit eines Schutzzauns hängt letztlich aber nicht davon ab, ob der Mitarbeiter gemeinsam mit dem Roboter Tätigkeiten auszuführen hat oder nicht. Vielmehr gilt es festzustellen, inwieweit die Anwendung ohne einen Schutzzaun sicher betrieben werden kann. Entscheidend ist dabei die Gesamtbetrachtung von Roboter, Werkzeug und Werkstück. Obwohl bei einer Klemmung zwischen einer Art von Werkstück und dem Roboter keine Verletzung eintritt, könnte es bei einem anderen Werkstück zu einer Verletzung kommen, wenn dieses scharfkantig ist. Das Bauteil hat also immer auch einen Einfluss. So ist ein Roboter, der Stahlbleche transportieren soll, wegen der möglichen Schnittverletzungen kaum für eine MRK-Anwendung geeignet.
Die geforderte Sicherheit steht häufig im Widerspruch zur unerlässlichen Produktivität. Sofern eine hohe Stückzahl in der Fertigung notwendig ist, bei einer MRK-Lösung jedoch die Geschwindigkeit des Roboters aus Sicherheitsgründen begrenzt werden muss oder er bei einer Annäherung sogar stoppt, sollte gegebenenfalls doch eine Trennung von Mensch und Roboter stattfinden. Wichtig ist somit, dass die Anwendung gleich zum Projektstart umfassend geprüft und über eine Risikobeurteilung bewertet wird, welche Gefährdungen vom Roboter ausgehen und ob diese akzeptabel sind respektive wie sie reduziert werden können.
Ausstattung mit sicherer Sensorik
Zur Evaluierung der Eignung von Robotern im kollaborativen Betrieb muss folglich genau auf die Applikation geschaut werden. Große Roboter und schwere Teile stellen nicht unbedingt ein Hindernis für MRK-Anwendungen dar. Mit sicherer Sensorik ausgestattet, können die Roboter bei langsamer Geschwindigkeit gemeinsam mit Menschen arbeiten. Als Beispiel sei eine Anwendung genannt, in der ein Roboter ein Reserverad in ein Auto einlegt. Hier wird ein Stoß des Roboters schon vorab durch entsprechende Sensorik verhindert respektive die Kraft des Roboters limitiert. Mit sicheren Momenten-Sensoren kann schnell auf Abweichungen der Kräfte innerhalb der geplanten Bahn des Roboters reagiert werden, sodass sich Schäden an Personen abwenden lassen.
Da die Energie bei einem Stoß quadratisch mit der Geschwindigkeit zunimmt, reicht in der genannten Applikation eine geringe sicher begrenzte Robotergeschwindigkeit aus, um die Stoßenergie bei einem ungewollten Kontakt auf das zulässige Maß zu beschränken. Gleichzeitig wird die Energie beim Aufprall des Roboters von dessen effektiver Masse sowie dem getroffenen Körperteil beeinflusst. Ist keine hohe Nutzlast gefordert, erweist es sich deshalb als sinnvoll, die Masse des Roboters ebenfalls zu verringern. Insbesondere dann, wenn ein Stoß nicht nur an der Hand oder dem Arm des Mitarbeiters erwartet wird, lässt sich über eine solche Massereduzierung unter Umständen eine etwas höhere Geschwindigkeit des Roboters umsetzen. Vor diesem Hintergrund sind verschiedene Leichtbauroboter auf dem Markt für MRK-Anwendungen erhältlich. Sicherheitsbezogene Kraft- oder Momenten-Sensoren im Robotersystem sorgen dafür, die Kraft des Roboters zu begrenzen und ihn im Fehlerfall schnell abzuschalten.
Grenzwerte für Stoß und Quetschung
Die Teile eins und zwei der aktuell harmonisierten Norm EN ISO 10218 geben keine Grenzwerte für den Kontakt von Roboter und Mensch vor. Für die Anwendung des kollaborativen Betriebs wird auf die Risikobeurteilung verwiesen. Die Norm ISO/TS 15066 für kollaborierende Roboter ist zwar im Sinne der Maschinenrichtlinie nicht harmonisiert, spiegelt aber den Stand der Technik wider. Sie führt Grenzwerte für Stoß und Quetschung auf.
Erste Überlegungen, an welcher Stelle ein Kontakt zwischen dem Roboter und dem Körper des Bedieners wahrscheinlich auftritt, bilden die Grundlage für die Verwendung der Grenzwerte. Diese Erwägungen sind entscheidend, weil verschiedene Körperteile unterschiedliche Belastungsgrenzen für Druck und Stoß aufweisen. Es kommt zudem darauf an, ob es sich um einen unbeabsichtigten, zufälligen Kontakt handelt, der selten vorkommen kann, oder ob es um eine regelmäßig eintretende Berührung geht. Ein Stoß, der die Schmerzschwelle erreicht, jedoch nicht zu einer Verletzung führt, ist dem Bedienpersonal im Dauereinsatz nicht zumutbar. Im Hinblick auf die Grenzwerte der Anwendung erweist sich die jeweilige Situation daher ebenso als wichtig. Nicht allein die Einhaltung der Grenzwerte ist ausschlaggebend, sondern auch die Ergebnisse der Risikobeurteilung.
Anpassung der Formgebung oder des Endeffektors
Wenn die Grenzwerte für die zulässigen Spitzendruckwerte überschritten werden, sind nicht in jedem Fall die Geschwindigkeit oder die Kraftwerte des Roboters anzupassen. Eine Adaption der Formgebung des Roboters oder des Endeffektors kann die entstehenden Spitzendruckwerte wesentlich beeinflussen. Lässt sich die Anwendung nicht mit herkömmlichen Greifern realisieren, können die erforderlichen biomechanischen Grenzwerte vielleicht durch Nutzung eines Saugers für die Teileentnahme befolgt werden. Die Formgebung des Werkstücks wirkt sich ebenfalls darauf aus, ob sich die Grenzwerte erfüllen lassen oder nicht. Diese ist allerdings meist vorgegeben und die Möglichkeiten einer Einflussnahme sind deshalb eher gering. Sofern erkennbar ist, dass den Grenzwerten aus der Risikobeurteilung unter keinen Umständen entsprochen werden kann, lässt sich keine echte Kollaboration umsetzen. In diesem Fall muss der Roboter sicher stillgesetzt werden, bevor eine Kontaktsituation mit dem Bedienpersonal eintritt.
Messung der Kraft- und Druckwerte
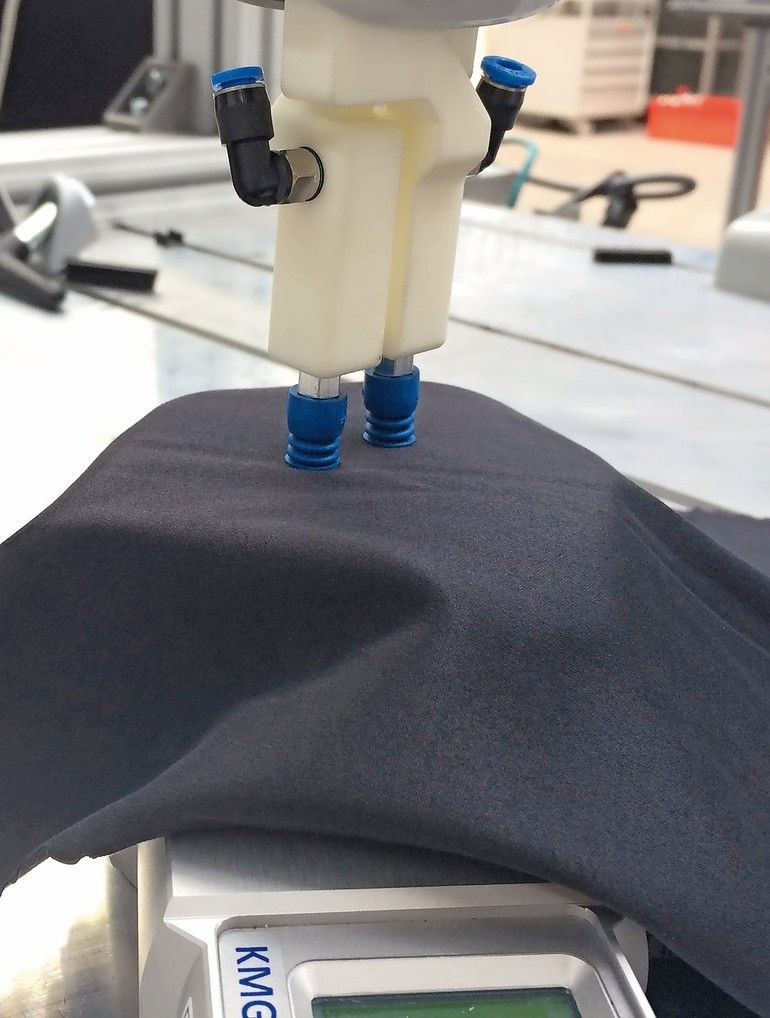
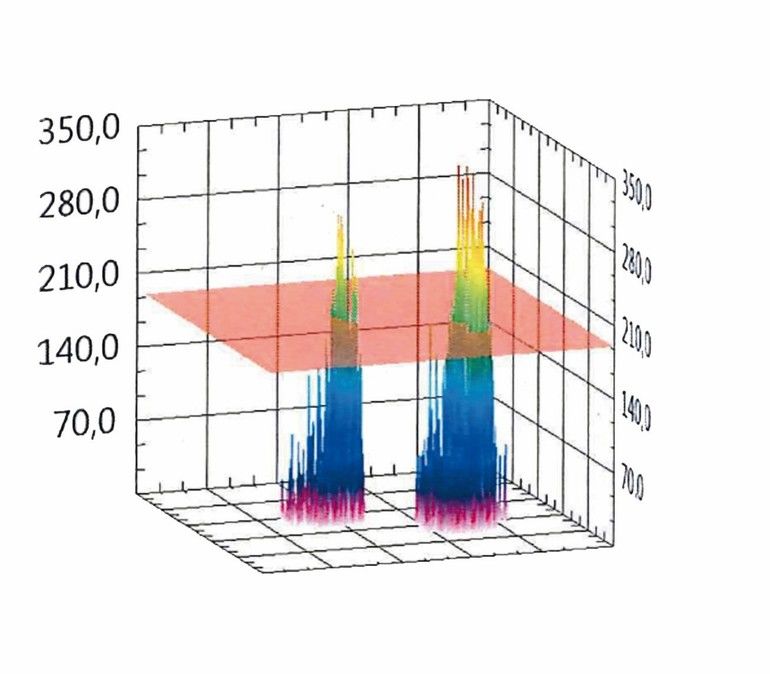
Die Wirksamkeit der auf Basis der Risikobeurteilung definierten Maßnahmen ist mit geeigneten Mitteln zu validieren. Die Einhaltung der festgelegten Kraft- und Druckwerte muss über eine Messung sichergestellt werden. Zur Kraftmessung kommt ein spezialisiertes Messgerät für MRK zum Einsatz, mit dem der dynamische Kraftverlauf über die Zeit aufgenommen und ausgewertet wird. Hierbei darf der Spitzenwert der Kraft in den ersten 0,5 Sekunden nicht überschritten werden. Nach Ablauf dieser Zeitspanne erfolgt eine Analyse der quasistatischen Kraft.
Sollten bereits Geräte für die Kraftmessung von Toren und Türen vorhanden sein, lassen sich diese nicht einfach für MRK-Anwendungen verwenden, da die Spezifikation für solche Messungen von derjenigen für Roboter abweicht. Die Erfassung der Druckspitzenwerte geschieht durch Messfolien, die sich je nach Druckwert unterschiedlich stark verfärben. Über eine spezielle Auswerte-Software kann auf diese Weise der Druckwert beurteilt werden. Abschließend sind die Ergebnisse der Messungen als Nachweis gemäß der EN ISO 13849–2 zu dokumentieren. eve
Phoenix Contact bietet Dienstleistungen für die Maschinensicherheit. Zur Broschüre:








{kind=link}