


Inhaltsverzeichnis
1. Vielschichtige Herausforderungen
2. Mit Schäden leben lernen
3. Nicht nur schauen, sondern machen
4. Erst Schweden, dann Jupitermond
In Italien arbeitet ein Team von Ingenieuren, Tauchern und Wissenschaftlern daran, die Machbarkeit des Anbaus von Kräutern, Obst und Gemüse unter Wasser zu beweisen. Nemos Garden wurde 2021 von Sergio Gamberini, Präsident des italienischen Tauchausrüstungsherstellers Ocean Reef Group, und seinem Sohn Luca Gamberini gegründet. Die Schlüsselinnovation ist eine Unterwasserbiosphäre, die sich einige Vorteile des Ozeans zu Nutzen macht: Temperaturstabilität, Wasserverdunstung, CO2-Absorption, Sauerstoffreichtum und Schutz vor Schädlingen. Das Start-up arbeitet derzeit mit Unterstützung von Siemens an der Industrialisierung. Neben den augenscheinlichen Anwendungen wie Windparks kommen künftig also auch bisher völlig untypische Nutzungen des Meeresbodens in Frage, ebenso müssen Öl- und Gasanlagen eventuell irgendwann zurückgebaut werden. Wo in der klassischen Industrie ein Techniker den Zustand solcher Anlagen meist recht einfach überprüfen kann, ist das unter Wasser mit sehr viel mehr Aufwand verbunden: Taucher oder Roboter sind nur begrenzt verfügbar, das Wetter muss für entsprechende Einsätze passen, vom logistischen Aufwand für Schiffe und Ausrüstung ganz zu schweigen.
Der Trend geht daher zu vollständig autonomen Unterwasserfahrzeugen, den AUVs: Angenommen hat sich derer unter anderem das Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI), denn das forscherische Herzstück ist – wie auch an Land – die Software. Außerhalb des Wassers sind passende Versuchsträger entweder bereits am Markt zu haben – wie etwa Traktoren – oder relativ unkompliziert realisierbar. Um adäquate Unterwasser-Fahrzeuge aber muss sich das DFKI selbst kümmern: „Die aktuell von uns entwickelten AUVs würden man so noch nicht in der Industrie einsetzen. Sie sind Forschungsträger, um grundlegende Algorithmen zu entwickeln“, sagt Leif Christensen, Teamleiter Maritime Robotik am DFKI in Bremen.
Vielschichtige Herausforderungen
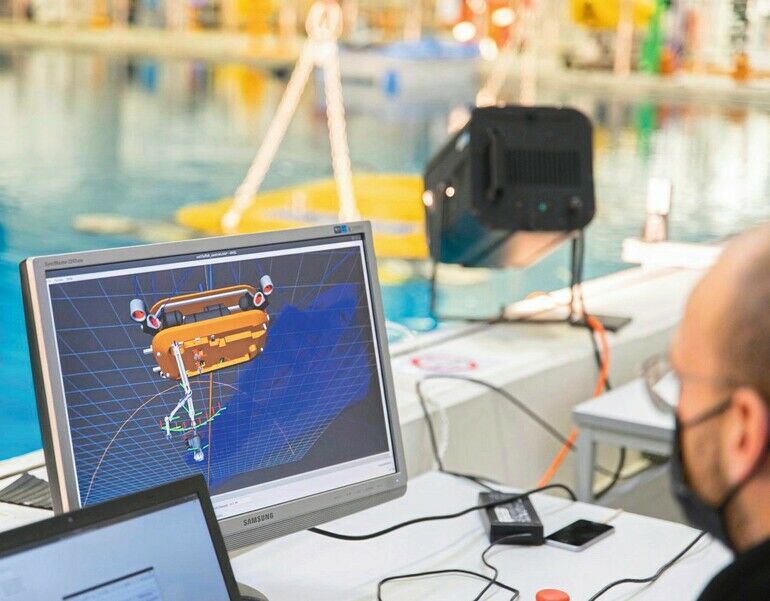
Die Simulation kann dabei anfangs zwar viel aufzeigen, an realen Tests geht aber schnell kein Weg vorbei. Schwer für solche Einsätze am Rechner prognostizieren lassen sich beispielsweise Magnetfelder. Daher lässt man diese von einer KI in der realen Umgebung erlernen, um sie für den Kompass des AUVs sauber kompensieren zu können. Für die eigenständige Kartierung nutzt man die KI-Strategien von autonomen Landfahrzeugen. Deren Algorithmen wurden hierzu vom Laserscanner auf akustische Sensoren adaptiert: „Die Herausforderung ist bei uns aber der sehr heterogene Ozean: Salzgehalte, Sediment, sogenannte Sprungschichten, zwischen denen die Temperatur schlagartig wechselt, Strömungen, Blasenbildung und viele andere Dinge beeinflussen die akustische Ausbreitung und das Rückwurfverhalten der Schallwellen“, erklärt Christensen. Ebenso vielschichtig ist die Steuerung: Diese erfolgt nicht über ein zentrales Element wie etwa Räder an Land, sondern benötigt Schub-Propeller, Lenkdüsen, Tariertanks und Steuerruder, die alle unterschiedlichen Prinzipien folgen während sie mit der unsteten Umgebung interagieren und sich dabei auch gegenseitig beeinflussen. „Für diese vielen Faktoren sind alle Unterwasser-Fahrzeuge schon immer zu knapp mit passenden Steuerelementen ausgestattet, weshalb einige Freiheitsgrade unkontrollierbar bleiben. Gleichzeitig sprechen die möglichen Steuerelemente eher träge an“, weiß Christensen. Sein Team muss sich daher sehr viel mit Unsicherheiten auseinandersetzen. An Land und selbst im Weltraum sei die Navigation in dieser Hinsicht teils einfacher.

Bild: DFKI, Annemarie Popp
Die Forscher des DFKI nutzen neben hauseigenen, bis zu 8 m tiefen Becken in einer Halle auch das Testzentrum Maritime Technologien auf Helgoland, das man 2019 zusammen mit dem in direkter Nachbarschaft in Bremen beheimateten Fraunhofer Institut für Fertigungstechnik und angewandte Materialforschung IFAM etabliert hat. Auf einigen Quadratkilometern Fläche und mit einer Wassertiefe von bis zu 45 m sind dort verschiedenste Erprobungsszenarien bei Hochseebedingungen möglich. Neben der echten Umgebung wären aber auch Testeinsätze an realen Assets wichtig. Und genau da mangelt es derzeit noch: „Die Betreiber von Energieanlagen oder auch Häfen schreckt ab, dass wir kein dauerhaftes Live-Bild haben und während der Tests nicht selbst steuern. Denn darum geht es ja – das System muss alleine funktionieren“, sagt Christensen. Das dafür nötige Vertrauen müsse man sich nun erarbeiten, um dann an die richtigen Player heranzukommen und zusammen mit ihnen die Systeme ausprobieren sowie auch weiterentwickeln zu können. Die Branche werde seiner Erfahrung nach aber immer offener, da auch an ferngesteuerten Fahrzeugen autonome Helfer zunehmend gewünscht würden. Beispielhaft dafür nennt Christensen etwa Steuerungssysteme, die automatisch den Abstand zu einer Struktur einhalten oder ein automatisch passend zum Asset zugreifender Manipulator.
Mit Schäden leben lernen
AUVs sollen künftig über lange Zeit getaucht etwa in einem Offshore-Windpark ‚wohnen‘ und dort Inspektionen und Service übernehmen. Materialschwächen, Bewuchs durch Algen und Kleinlebewesen oder etwaige Kollisionsschäden können auf langen, autarken Missionen aber nicht sofort behoben werden, wie das bei autonomen Landfahrzeugen oder auch ferngesteuerten Tauchrobotern möglich ist. „Man kann so ein Fahrzeug auch nicht so robust bauen, dass es allem widersteht. Das wäre zudem sehr teuer“, sagt Christensen. Viel einfacher sei es, zu akzeptieren, dass sich das Fahrzeug verändert und die Software damit umgehen können muss. In seiner Doktorarbeit und Folgeprojekten hat sich etwa sein Kollege Bilal Wehbe damit befasst, wie ein AUV sein hydrodynamisches Modell unterwegs selbst erlernt. Ändert sich dann etwas an der Form des Fahrzeuges oder der Funktionalität der Steuer- bzw. Antriebselemente, adaptiert die KI das Modell entsprechend darauf.
Auch die komplette Missionsplanung soll künftig die KI live unterwegs übernehmen. Eine fest vorprogrammierte Route gibt es dann nicht. Stattdessen werden die aktuellen Umgebungsparameter wie Strömung oder Sicht sowie auch etwaige Schäden am Fahrzeug in den besten Weg zur Erfüllung des Missionsziels einkalkuliert. Die notwendigen Reparaturen können dann während der regulären Wartungszyklen erledigt werden.
Eine weitere Herausforderung für Systeme, die dauerhaft mit einer KI arbeiten, ist die dafür notwendige Rechenpower an Bord. Die Versuchsprototypen des DFKI können hier meist etwas komfortabler ausgestattet werden, da man gerne Reserven für künftige Projekte hat und die Langzeiteinsatzfähigkeit hinsichtlich des Energiebedarfs zu diesem frühen Zeitpunkt eine untergeordnete Rolle spielt. Künftig könnte das über geteilte Rechenleistung mehrerer AUVs im Verbund, FPGAs statt klassischer PCs im Fahrzeug und auch Edge-Computing an der Ladestation oder am Asset – etwa einer Offshore-Windkraftanlage – gelöst werden.
Nicht nur schauen, sondern machen
Der aktuelle Versuchsträger Cuttlefish wurde darauf bereits vorbereitet. Er ist nicht nur als Inspektions- sondern auch Interventionsroboter konzipiert. Bei Bedarf richtet sich das AUV frei im Wasser auf, indem es seinen Schwerpunkt und Auftrieb ändert. Dafür kann seine KI auch akustisch mit einem Asset kommunizieren. Diese Signale reichen jedoch nur für rudimentäre Befehle, etwa „komm näher, weiter links“. Einer der beiden Aktuator-Arme des Cuttlefish kann dann am Asset andocken, was einerseits Stabilität für Handling-Aufgaben des anderen Arms bietet, aber auch für eine Breitband-Verbindung genutzt werden kann. Diese würde dann auch eine Fernsteuerung ermöglichen, etwa um komplexe, spezifische Aufgaben im hybriden Betrieb zu erledigen. Dabei wäre nebenbei auch ein Zugriff auf externes Computing möglich.
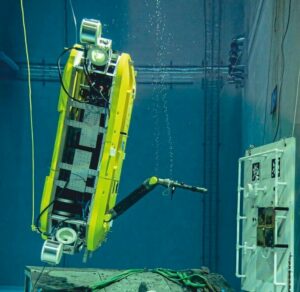
Bild: DFKI, Thomas Frank
Das DFKI geht jedoch seit etwa zehn Jahren noch einen sehr großen Schritt weiter: Zusammen mit dem Deutschen Zentrum für Luft- und Raumfahrt (DLR) entwickelt man ein Navigationskonzept für die Ozeane unter dem Eis des Jupitermondes Europa. Denn dort sehen Planetenforscher in unserem Sonnensystem die besten Chancen für außerirdisches Leben. Das AUV soll sich an Bord eines Shuttles durch die auf bis zu 18 km dick berechnete Eisschicht schmelzen. „Hierbei wäre es nicht möglich, bereits am Markt verfügbare Roboter nur auf die Umgebung und die Aufgaben anzupassen. Statt dessen muss das komplette Konzept auf die Mission hin entwickelt werden“, sagt Christensen. Kommt das Shuttle am unteren Ende der Eisdecke an, entlässt es das Fahrzeug ins Wasser und dient als Basisstation. Denn ohne Verbindung zur Oberfläche könnten keine Daten übermittelt werden. Derzeit taucht der dafür gebaute Versuchsträger DeepLeng auf maximal zwei Kilometer Tiefe und hätte etwa zehn Stunden Energie. Laut der Planetenforscher könnte der Ozean aber bis zu 100 km tief sein, durch die geringere Gravitation sind die vorherrschenden Drücke aber vergleichbar mit den tiefsten Stellen des Ozeans auf der Erde. „Auf in den Marianengraben zu tauchen ist zwar noch immer nicht trivial – aber zumindest lösbar“, so Christensen. Nach der Probenentnahme am Grund muss DeepLeng dann möglichst effizient zurück zum Einstiegsloch manövrieren.
Erst Schweden, dann Jupitermond
Die Navigation erfolgt natürlich völlig ohne Satellitensysteme wie GPS. Möglich sind aber Konzepte wie das sogenannte USBL (ultra-short baseline): Über einen Transceiver an der Shuttlestation am unteren Ende des Eislochs orientiert sich das AUV via akustischem Ping. Diese Technik ist in der maritimen Branche bereits Usus. Bei den großen Wassertiefen auf dem Jupitermond käme das jedoch schnell an seine Grenzen. Der DeepLeng muss sich dann also auf seine Sensoren und die Trägheitsnavigation mit faseroptischen Gyroskopen verlassen. „Absolute Präzision brauchen wir aber erst wieder für das Docken an der Station. Bis dorthin sind Unsicherheiten leicht zu verkraften“, sagt Christensen. Je näher man dem Eisloch kommt, desto besser werden auch die Signale des USBL. Ebenfalls denkbar wären kleine drohnenartige Mini-AUVs, die sich aus dem Träger ausklinken und dann entfernt im Eis verankern. Sie dienen als Transponder und könnten ein sogenanntes Long-Baseline-System (LBL) etablieren, das Konzept wird ebenfalls seit längerem zur Unterwasser-Navigation genutzt. Es ist genauer, da sich der DeepLeng zu mehreren Punkten im Raum referenzieren kann.

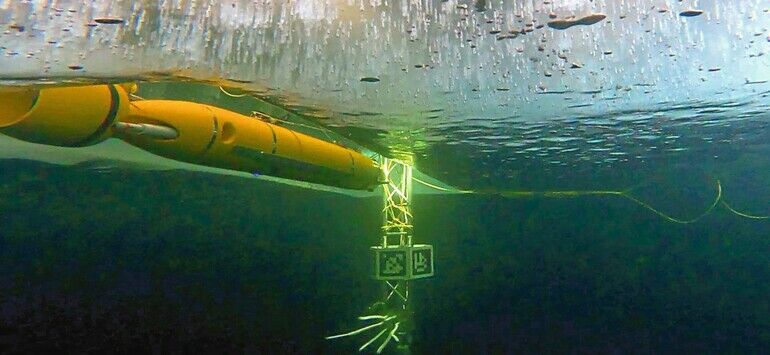
Bild: DFKI, Annemarie Popp
Für praktische Tests ging der der gelbe DFKI-Torpedo im Sommer dieses Jahres unter das Eis eines zugefrorenen Sees in Schweden, weit oberhalb des Polarkreises. Dort bekommen auch Polarforscher ihre praktische Grundausbildung, die örtlichen Spezialisten unterstützten das DFKI daher bei der Errichtung des Ausgangslagers auf dem gefrorenen See. Alleine die Sicherheitsvorkehrungen dafür bedeuteten einen immensen Aufwand, bis dann das Team schlussendlich wirklich am Eisloch sitzen und testen konnte.
Weitere Informationen zum Unterwasser-Gewächshaus von Nemos Garden im Video









{kind=link}