
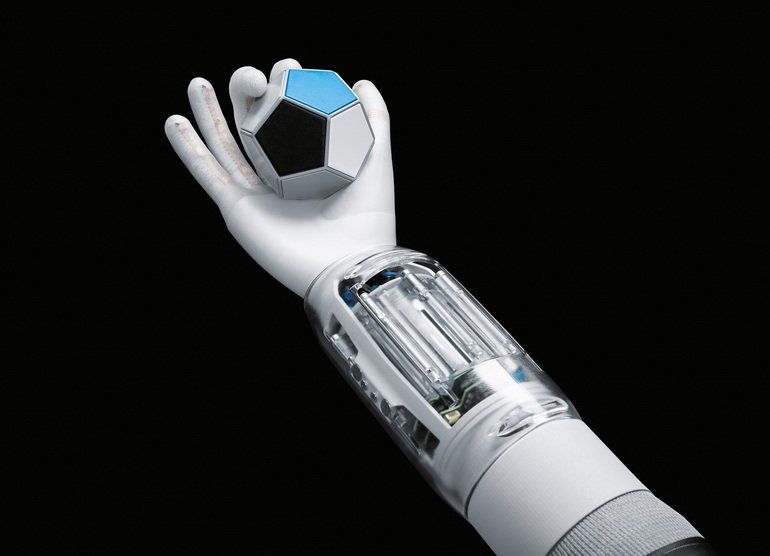
Festo zeigt auf der Hannover Messe 2019 die pneumatische Roboterhand BionicSoftHand. Kombiniert mit dem BionicSoftArm, einem pneumatischen Leichtbauroboter, eignen sich die Future Concepts für die Mensch-Roboter-Kollaboration.
Inhaltsverzeichnis
1. Künstliche Intelligenz
2. Proportionale Piezoventile für eine präzise Regelung
3. BionicSoftArm: Ein Roboterarm, viele Variationsmöglichkeiten
4. Flexible Anwendungsmöglichkeiten
Damit die BionicSoftHand sicher und direkt mit dem Menschen interagieren kann, wird sie pneumatisch betrieben. Im Gegensatz zur menschlichen Hand besitzt die BionicSoftHand keine Knochen. Ihre Finger bestehen aus flexiblen Balgstrukturen mit Luftkammern. Umschlossen sind die Bälge in den Fingern von einem speziellen 3D-Textilmantel, der sowohl aus elastischen als auch hoch festen Fäden gestrickt ist. Damit kann über das Textil genau bestimmt werden, an welchen Stellen die Struktur sich ausdehnt und damit Kraft entfaltet und wo sie an der Ausdehnung gehindert wird. Dadurch ist sie leicht, nachgiebig, anpassungsfähig und sensibel, aber dennoch in der Lage, starke Kräfte auszuüben.
Künstliche Intelligenz
Die Lernmethoden von Maschinen sind mit denen des Menschen vergleichbar: ob positiv oder negativ – sie benötigen eine Rückmeldung auf ihre Aktionen, um diese einordnen zu können und daraus zu lernen. Bei der BionicSoftHand kommt die Methode des Reinforcement Learning zum Einsatz, das Lernen durch Bestärken.
Das bedeutet: Statt einer konkreten Handlung, die sie nachahmen muss, bekommt die Hand lediglich ein Ziel vorgegeben. Dieses versucht sie durch Ausprobieren (Trial-and-Error) zu erreichen. Anhand des erhaltenen Feedbacks optimiert sie nach und nach ihre Aktionen, bis sie schließlich die gestellte Aufgabe erfolgreich löst.
Konkret soll die BionicSoftHand einen zwölfseitigen Würfel so drehen, dass am Ende eine vorher festgelegte Seite nach oben zeigt. Das Einlernen der dazu nötigen Bewegungsstrategie geschieht in einer virtuellen Umgebung anhand eines digitalen Zwillings, der mithilfe der Daten einer Tiefenkamera und den Algorithmen der künstlichen Intelligenz erstellt wird.
Proportionale Piezoventile für eine präzise Regelung
Um den Aufwand für die Verschlauchung der BionicSoftHand möglichst gering zu halten, haben die Entwickler eigens eine kleinbauende, digital geregelte Ventilinsel konstruiert, die direkt unterhalb der Hand angebracht ist. Dadurch müssen die Schläuche zur Ansteuerung der Finger nicht durch den kompletten Roboterarm gezogen werden. So lässt sich die BionicSoftHand mit nur je einem Schlauch für Zuluft und Abluft schnell und einfach anschließen und in Betrieb nehmen. Mit den eingesetzten proportionalen Piezoventilen lassen sich die Bewegungen der Finger präzise regeln.
BionicSoftArm: Ein Roboterarm, viele Variationsmöglichkeiten
Die strikte Trennung zwischen der menschlichen Arbeit und den automatisierten Aktionen von Robotern wird zunehmend aufgehoben. Ihre Arbeitsbereiche verschmelzen zu einem kollaborativen Arbeitsraum, in dem vor allem Roboter gefragt sein werden, die sich flexibel anpassen lassen und sich auf unterschiedliche Szenarien einstellen. Mit dem BionicSoftArm, einem flexiblen, pneumatischen Roboterarm, können in Zukunft Mensch und Maschine gleichzeitig dasselbe Werkstück bearbeiten, ohne dass sie voneinander abgeschirmt werden müssen.
Der BionicSoftArm ist eine kompakte Weiterentwicklung des BionicMotionRobot von Festo, dessen Anwendungsspektrum deutlich erweitert wurde. Möglich macht das sein modularer Aufbau: Er lässt sich bis zu sieben pneumatischen Balgsegmenten und Drehantrieben kombinieren. Damit ist er in Reichweite und Beweglichkeit maximal flexibel und kann bei Bedarf auch auf engstem Raum um Hindernisse herum arbeiten. Gleichzeitig ist er von Grund auf nachgiebig und kann gefahrlos mit dem Menschen zusammenarbeiten. Eine direkte Mensch-Roboter-Kollaboration ist mit dem BionicSoftArm ebenso möglich wie der Einsatz in klassischen SCARA-Anwendungen, zum Beispiel Pick-and-Place-Aufgaben.
Flexible Anwendungsmöglichkeiten
Je nach Aufbau und montiertem Greifer lässt sich der modulare Roboterarm für die verschiedensten Anwendungen nutzen. Seine nachgiebige Kinematik erleichtert ihm die Anpassung an unterschiedliche Aufgaben an wechselnden Orten: Der Wegfall aufwendiger Sicherheitseinrichtungen wie Käfige oder Lichtschranken verkürzt die Umbauzeiten und ermöglicht so einen flexiblen Einsatz – ganz im Sinne einer wandlungsfähigen und wirtschaftlichen Fertigung. bt








{kind=link}