




Inhaltsverzeichnis
1. Assistenzroboter und Cobots
2. Transportaufgaben im Freien
3. Hochgradig anpassbares Roboter-Handsystem
Kollaborierende Kompaktroboter, Roboterhände und -finger, Outdoor-Roboter und Assistenzroboter zur Patientenführung in Krankenhäusern sind einige jüngere Beispiele von Roboter-Projekten, an denen NSK beteiligt ist. Die Mehrzahl der Entwicklungen hat NSK komplett in Eigenregie umgesetzt. Ziel ist es dabei nicht etwa, eigene stationäre oder mobile Roboter ins Programm aufzunehmen, sondern Systemkompetenz zu erlangen.
Bei einigen Projekten ist auch der Fachkräftemangel, der in Japan ebenso bemerkbar ist wie in Deutschland, verbunden mit der sozialen Verantwortung eine treibende Kraft für die Entwicklung.
Assistenzroboter und Cobots

Bild: NSK
2022 hat NSK einen Assistenzroboter für den Patiententransport entwickelt, der Patientenliegen antreibt. Die sanften Bewegungsabläufe und der geräuscharme Betrieb von NSK-Antriebskomponenten sind ideal für Roboteranwendungen in diesem Einsatzbereich. In der Konstruktionsphase dieses mobilen Roboters verfolgte man ebenfalls ein innovatives Konzept: Die Entwickler arbeiteten eng mit den potenziellen Anwendern des Roboters zusammen und verifizierten ihre Ideen innerhalb von kurzen Zyklen in der Praxis. Sie entwickelten also nicht einen ersten Prototypen des gesamten Roboters, sondern holten im Dreimonatsrhythmus das Feedback der Anwender im Krankenhaus beziehungsweise in der Pflege ein und setzten deren Verbesserungsvorschläge schrittweise während des Entwicklungsprozesses um.

Bild: NSK
Ein weiteres aktuelles NSK-Entwicklungsprojekt im Bereich der mobilen Robotik nimmt kompakte und kollaborative Roboter – und wie beim ersten Beispiel – den Markt des Gesundheitswesens in den Blick. Bei den sogenannten Active Casters handelt es sich um elektromotorische, omnidirektional bewegliche Antriebseinheiten, die sich für verschiedene Cobot- und Servicerobotik-Anwendungen eignen. Sie sind mit zwei Elektromotoren pro Rad ausgestattet. Lenkung und Bewegung werden durch den Unterschied in Drehrichtung und -geschwindigkeit geregelt und synchronisiert. Zu den Entwicklungszielen dieser Radeinheiten gehört die Einsatzmöglichkeit in unmittelbarer Nähe von Menschen, zum Beispiel in Krankenhäusern und Pflegeeinrichtungen. Zurzeit wird der Active Caster umfassenden Betriebstests in einem Labor mit verschiedenen Oberflächen wie Schrägen, unebenen Böden und Teppichen unterzogen. Das Ziel: Ein von Active Casters angetriebener Cobot soll in der Lage sein, schwere Lasten zu transportieren, auf schwierigem Terrain sicher zu fahren und kontrolliert Steigungen zu bewältigen.
Transportaufgaben im Freien
Für eine Anwendung ganz anderer Art ist eine aktuelle Neuentwicklung der mobilen Robotik bestimmt, die noch nicht ganz abgeschlossen ist. Zielmärkte sind hier die Industrie und die Logistik. Die Besonderheit der mobilen Roboterplattform mit autonomer Navigation besteht darin, dass sie Lasten auf unebener Fahrbahn transportieren kann. Damit wird die Voraussetzung für einen automatisierten Transport in Outdoor-Bereichen geschaffen. Eben das stellt eine große technische Herausforderung dar, für die NSK eine Lösung entwickelt hat, die auf den Kerntechnologien des Unternehmens basiert.
Die jeweils drei Räder auf jeder Seite der mobilen Roboterplattform sind mit dem „Pantograph-Link“-Aufhängungssystem von NSK ausgestattet, das einen konstanten Bodenkontakt der Antriebsräder während des Fahrbetriebs gewährleistet.

Bild: NSK
Auf Basis dieser Konstruktion, die NSK gemeinsam mit dem Tokyo Metropolitan Industrial Technology Research Institute zum Patent angemeldet hat, kann der Roboter mit seinem reibungsarmen Direktantrieb auch unebene Oberflächen befahren und Höhenunterschiede von bis zu 50 mm überwinden. Eine weitere zum Patent angemeldete Innovation sorgt dabei für die selbsttätige horizontale Ausrichtung dieser Plattform bei Steigungen und Gefällen von bis zu 10°. Der niedrige Schwerpunkt des nur 312 mm hohen Roboters steigert die Sicherheit des Fahrbetriebs auf unebenem Gelände. Navigiert wird mit Hilfe einer 3D-Bildverarbeitung, die eine genaue Wahrnehmung der Umgebung im Freien und in engen Bereichen ermöglicht. NSK plant die Entwicklung von Varianten mit unterschiedlichen Konfigurationen der Aufhängungs- und Schwingungsdämpfungs-Einheiten.
Hochgradig anpassbares Roboter-Handsystem

Bild: NSK
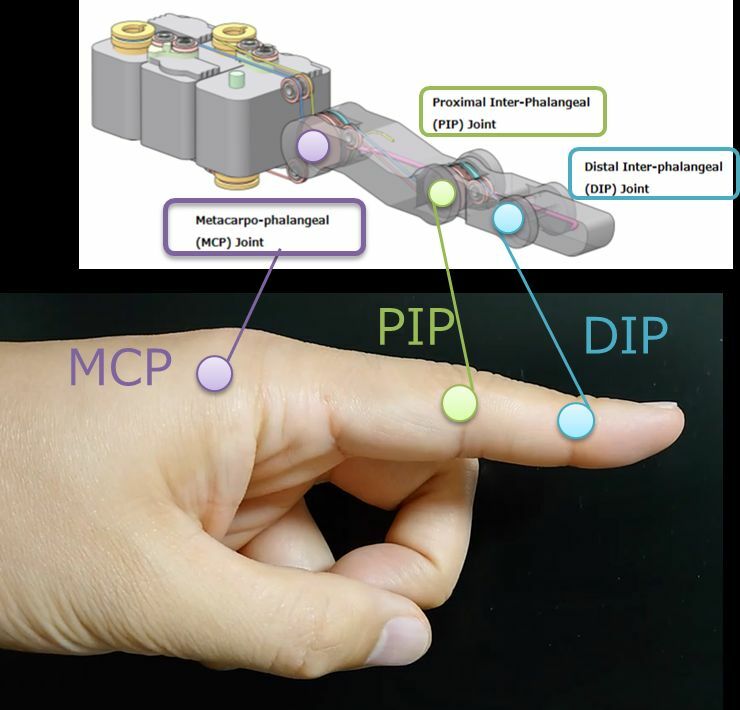
In einem anderen, deutsch-japanischen Projekt gemeinsam mit dem DLR hat sich NSK an der Entwicklung eines flexiblen Roboterhandsystems beteiligt, dessen Fingermodule kombinierbar und individuell anpassbar sind. Dieses Konzept eröffnet dem Handhabungssystem zahlreiche und ganz unterschiedliche Anwendungsmöglichkeiten, weil die Hand eine Vielzahl von Objekten greifen kann, und es schafft die Voraussetzung für eine kostengünstige Produktion. Das ist ein wichtiger Faktor gerade bei nicht-industriellen Anwendungen und zugleich ein Alleinstellungsmerkmal im Vergleich zu vorhandenen Roboterhänden, die extrem teuer sind, wenn sie ganz unterschiedliche Objekte greifen können. Bislang waren eher solche Greifer kostengünstig, die nur eine einzige Art oder Größe von Objekten handhaben können.
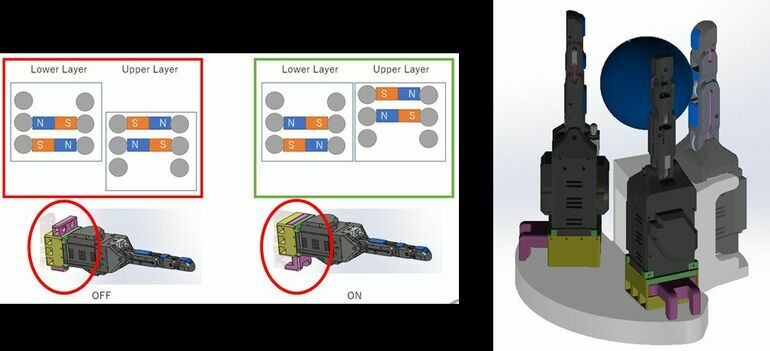
Die sanfte Bewegung und das schonende Greifen von verschiedenen Objekten werden durch die vom DLR entwickelte Drahtantriebstechnologie gewährleistet. NSK bringt einen Magnetmechanismus in die gemeinsame Entwicklung ein, der das schnelle Verbinden und Lösen der Fingermodule durch einfaches Ziehen eines Hebels ermöglicht.
Mit dieser Entwicklung möchten NSK und das DLR einen Beitrag zur Mechanisierung und Automatisierung insbesondere in kostensensiblen Anwendungsbereichen leisten. Aktuell stellt NSK die Roboterhand bei Systemintegratoren und bei Betreibern von Robotern vor. Erste Feldtests werden in Kürze beginnen. Und nicht nur mit diesem, sondern auch mit den anderen hier beschriebenen Entwicklungsprojekten verfolgt NSK, der (mobilen) Robotik neue Anwendungsbereiche zu erschließen und dabei auch das in Japan ebenso wie in Deutschland drängende Thema Fachkräftemangel zu adressieren. (sc)








{kind=link}