



Fortschritt in der Antriebstechnik
Die EPU-G von Moog repräsentiert einen bedeutenden Fortschritt in der elektrohydrostatischen Antriebstechnik und ist...
Inhaltsverzeichnis
1. Funktionsweise und Anwendungsfelder
2. Einsatz in der Robotik
Der Fluidic Muscle DMSP der Festo AG & Co. KG, Esslingen, ist ein Zugaktuator, der dem biologischen Muskel nachempfunden ist. Der sogenannte pneumatische Muskel besteht aus einem Kontraktionsschlauch und Anbindungsstücken. Sein Kontraktionsschlauch setzt sich aus einer Gummimembran und aus einem innenliegenden Gelege aus Aramidgarnen zusammen. Die Membran schließt das Betriebsmedium hermetisch dicht ein. Die Aramidgarne dienen als Festigkeitsträger sowie zur Kraftübertragung. Der Werkstoff Aramid für die Garne ist nicht von ungefähr gewählt. Aufgrund ihrer molekularen Struktur zeichnen sich Aramidfasern durch eine sehr hohe Festigkeit, hohe Schlagzähigkeit und hohe Bruchdehnung sowie eine gute Schwingungsdämpfung aus. Je nach Muskelgröße werden bei nur 2 mm Wandstärke bis zu 240 Fasern eingearbeitet. Beim kleinsten Modell sind etwa 60 Fasern auf zwei Ebenen bei einer Wandstärke von 1 mm verteilt. Trotz der hohen Anzahl berühren sich die Fasern an keiner Stelle in der Membran. Je nach Anordnung der Fasern verändern sich auch die Eigenschaften des Muskels. Die einzelne Faser ist sehr fein und empfindlich, ihr Durchmesser liegt je nach Muskelgröße zwischen 0,1 und 0,3 mm. Im Verbund und in Kombination mit dem elastischen Material sind sie stabil und dehnbar.
Funktionsweise und Anwendungsfelder
Im einfachsten Fall arbeitet der pneumatische Muskel als einfachwirkender Aktuator gegen eine mechanische Feder beziehungsweise eine Last. Durch die mechanische Feder wird der Muskel im expandierten, drucklosen Zustand aus seiner Ruhelage heraus vorgereckt. Hinsichtlich der technischen Eigenschaften des Muskels ist dieser Betriebszustand ideal: Im drucklosen Zustand wird die Membran nicht gestaucht. Bei Änderung einer äußeren Kraft verhält sich der Muskel wie eine Feder: Er folgt der Krafteinwirkung. Beim pneumatischen Muskel kann sowohl die Vorspannkraft dieser „pneumatischen Feder“ als auch ihre Federsteifigkeit beeinflusst werden. In seiner Feder-Funktion kann der Muskel mit konstantem Druck oder mit konstantem Volumen betrieben werden. Es ergeben sich unterschiedliche Federkennlinien, so dass man die Federwirkung optimal auf die Aufgabenstellung anpassen kann.
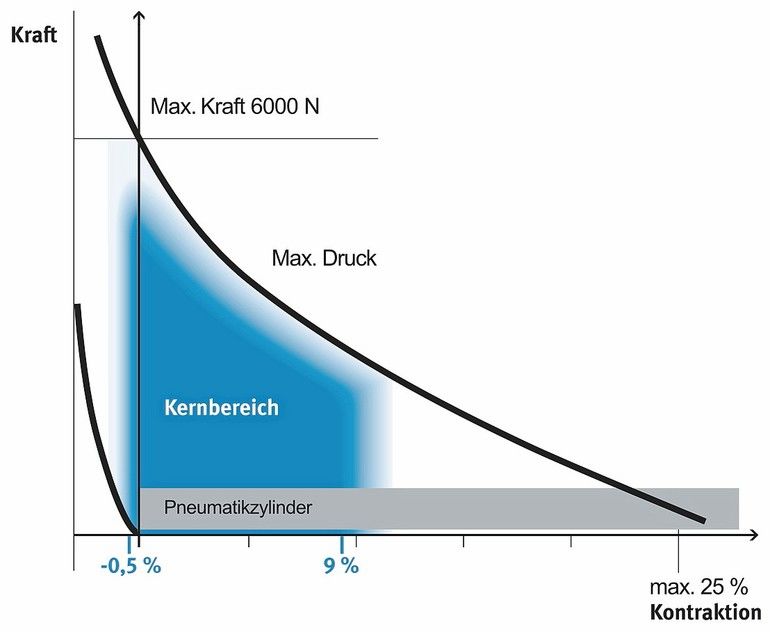
Legt man einen Innendruck an das System an, dehnt sich die schlauchförmige Membran in Umfangsrichtung aus. Daraus entstehen eine Zugkraft und eine Kontraktionsbewegung in Längsrichtung. Die maximal nutzbare Zugkraft steht zu Beginn der Kontraktion zur Verfügung und fällt mit dem Hub ab. Im drucklosen, unbelasteten Zustand wird die Nennlänge des pneumatischen Muskels definiert. Neben seiner positiven Funktion als pneumatische Feder beispielsweise in der Kettbaumbremse eines industriellen Webstuhls findet er ebenfalls Einsatz in folgenden Anwendungsfeldern:
Vibrieren und Rütteln: Er vibriert und rüttelt mit kleinen und hohen Frequenzen. Amplitude und Frequenz können unabhängig voneinander eingestellt werden. Daher wird der pneumatische Muskel für Dosier-, Sieb-, oder Verdichtungsaufgaben verwendet. Sein Nutzen:
- Frequenz bis 150Hz
- Amplitude/Frequenz unabhängig einstellbar
- schmutzunempfindlich
Maximale Frequenz bei entsprechendem Hub:
| Fluidic Muscle | Hub | |||
| 0,1 mm | 1 mm | 10 mm | 20 mm | |
| DMSP-5-…-AM-AM | 150 Hz | 100 Hz | 20 Hz | 12 Hz |
| DMSP-10-…-AM-AM | 150 Hz | 100 Hz | 20 Hz | 12 Hz |
| DMSP-20-…-AM-AM | 100 Hz | 50 Hz | 15 Hz | 10 Hz |
| DMSP-40-…-AM-AM | 80 Hz | 35 Hz | 12 Hz | 6 Hz |
Spannen: Bei engen Platzverhältnissen spannt er mit deutlich höherer Kraft als ein konventioneller Pneumatikzylinder gleichen Durchmessers, reibungsfrei und ohne Leckage. Anwendung findet er beispielsweise in einer Spannvorrichtung für Bleche in einer Schweißanlage zur Herstellung von Thermoschränken. Der Nutzen:
- Hohe Kraft bei kleinem Durchmesser
- schmutzunempfindlich
- Reibungsfreie Bewegung
- hermetisch dicht
Der pneumatische Muskel ist in folgenden Größen und Nennlängen erhältlich:
| Fluidic Muscle | Nennlänge | Betriebsdruck | Max. Spannkraft/ Außen-Ø | Spannkraft Zylinder mit vergleichbarem Außen-Ø |
| DMSP-5 | 30 … 1000 | 6 bar | 140 N/11 mm | EG-6:
12 N/10 mm |
| DMSP-10 | 40 … 9000 | 8 bar | 630 N/22 mm | ESNU-16:
143 N/20 mm |
| DMSP-20 | 60 … 9000 | 6 bar | 1500 N/35 mm | ESNU-32:
442 N/38 mm |
| DMSP-40 | 120 … 9000 | 6 bar | 6000 N/57 mm | ESNU-50:
1071 N/57 mm |
Ein weiteres Einsatzgebiet des Muskels findet sich im Bereich Hebeapplikationen. Je nach zu hebender Last, kann hierfür das entsprechende Lösungspaket angeboten werden. Festo bietet bereits heute ein pneumatisches Grundpaket für Hebeeinheiten bis 25 kg an. Dieses Grundpaket umfasst neben den auf den jeweiligen Kunden abgestimmten pneumatischen Muskeln eine Wartungseinheit. Diese Wartungseinheit besteht aus:
- Einer Grundsteuereinheit mit Druckregler für min. und max. Betriebsdruck
- Einer manipulationssicheren Drossel zur Einstellung der maximalen Verfahrgeschwindigkeit
- Einem gesteuerten Rückschlagventil zum Halten der Position bei Verlust des Versorgungsdrucks
Darüber hinaus hält das Unternehmen für das pneumatische Grundpaket passende Befestigungselemente, Schläuche und Ventile bereit. Optional ist ein Parallelgreifer DHPS für Handlingaufgaben verfügbar. Darüber hinaus ist der pneumatische Muskel in seinen gesamten vier Baugrößen für den Einsatz im Reinraum (Reinraumklasse ISO 4 nach Norm 14644–14)klassifiziert.
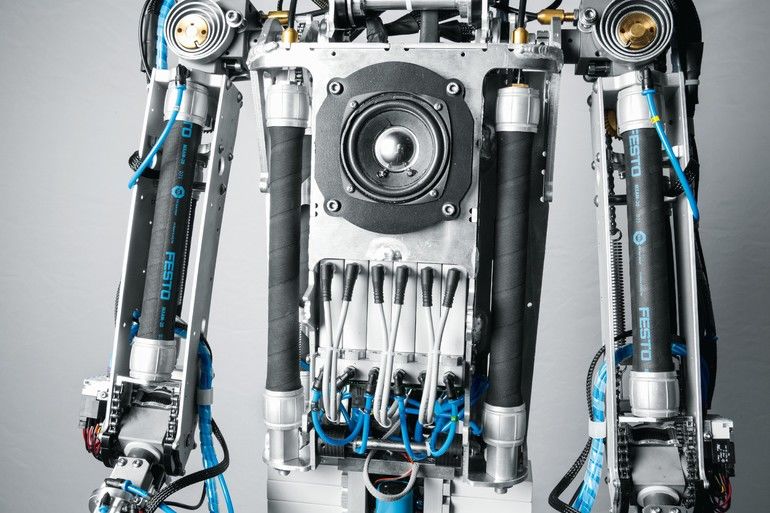
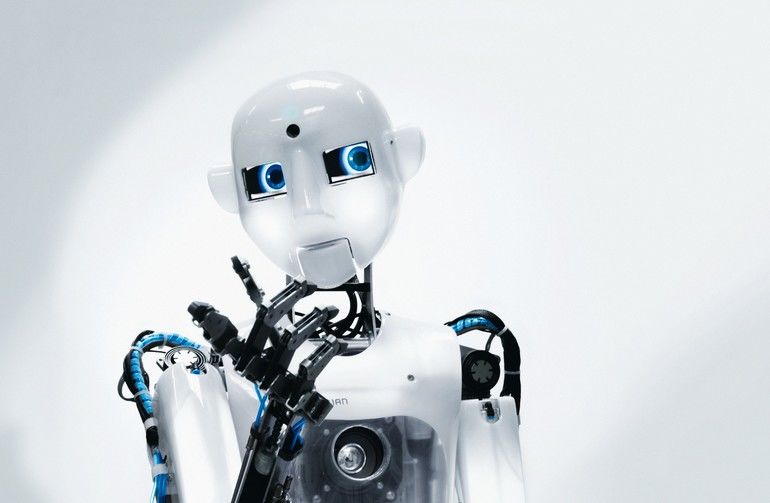
Einsatz in der Robotik
Was wäre aber ein bionischer Muskel ohne Einsatz in einem bionischen System? Im Phaeno-Wissenschaftscenter in Wolfsburg begrüßt ein humanoider Roboter die Besucher. Ein Großteil seiner menschenähnlichen Beweglichkeit beruht auf den pneumatischen Muskeln „Fluidic Muscle“. Die Bewegung der Arme und Hände übernehmen jeweils insgesamt zwei beziehungsweise acht künstliche Muskeln in unterschiedlichen Größen. Angesteuert werden sie unter anderem von Piezoventilen VEAB des Herstellers.
Details zum Fluidic Muscle DMSP: hier.pro/YCFHe
Kontakt:
Festo AG & Co. KG
Ruiter Straße 82
73734 Esslingen
Germany
Tel: +49 (0) 711 347 0
Fax: +49 (0) 711 347 2144
Ebenfalls interessant









{kind=link}