









Wie können Automatisierer KI-Modelle intuitiv entwickeln und in die Steuerung integrieren? Wie lässt sich überschüssige Energie im Antriebsverbund wieder...
Inhaltsverzeichnis
1. Robotertechnik für flexible Produktionslayouts
2. Einfache Implementierung und Inbetriebnahme der Robotertechnik
3. Robotertechnik nutzt maschinelles Lernen als KI-Teilbereich
KEM Konstruktion: Welche Robotiktrends verfolgen Sie im Engineering?
Volker Hartmann (Bosch Rexroth): Die entscheidenden Differenzierungsmerkmale in der Robotik sind in Zukunft Sensorik, Software, Vernetzbarkeit und die einfache Handhabung ohne Expertenwissen. Die Sensorik spielt eine entscheidende Rolle für das produktive und kollaborative Nebeneinander von Menschen und Robotern ohne trennende Schutzumhausung. Hier setzt unser APAS (automatischer Produktionsassistent) mit seiner speziellen Sensorhaut Maßstäbe. Mit unseren Robotics-Lösungen reduzieren Anwender ihren Programmieraufwand. In Zukunft benötigen sie hierfür weniger bis kein Expertenwissen.
Michael Otto (Kuka): Konkret geht es uns um Themen wie Digitalisierung, Mobilität, modulare Produktionszellen sowie um betriebsbereite und einfach bedienbare Systeme.
Michael Finke (Mitsubishi Electric): Hochaktuell ist bei uns das Trendthema KI in der Robotik. Wie kann künstliche Intelligenz die Zusammenarbeit zwischen Mensch und Roboter unterstützen? Hierfür verfolgen wir mehrere Ansätze. Zum Beispiel wird durch die Analyse von in Echtzeit erfassten Betriebsparameterwerten ein Wartungsbedarf ermittelt, bevor er anfällt. So können Maßnahmen optimal im Voraus geplant und auf ein Minimum reduziert werden. Wir nutzen unsere konzerneigene Maisart-KI-Technologie, die per Smart-Plus-Zusatzkarte am Melfa-Roboter implementiert werden kann. Wichtig sind für uns ebenfalls eine intuitive Programmier- und Simulationsumgebung sowie kosteneffiziente Lösungen für produzierende Betriebe mit geringen Taktzeiten.
Peter Lange (Omron): Kollaborative Roboter sind derzeit ein heiß diskutiertes Thema. Das umfasst auch Anwendungen, bei denen Cobots und mobile Roboter gemeinsam mit Menschen arbeiten. Damit wird eine flexible Produktion ermöglicht, gleichzeitig werden die Arbeiter von körperlich belastenden und repetitiven Aufgaben entlastet und können sich auf kreativere Aufgaben konzentrieren.
Bei der Betrachtung der Robotertechnologie ist im Moment die integrierte Steuerung eines der wichtigen Themen – zum Beispiel die Integration von Roboterfunktionalitäten in die SPS. Dies ermöglicht die Steuerung der gesamten Maschine und erleichtert die Installation durch Simulations- und Offline-Testmöglichkeiten. Im gleichen Zug werden Softwareprobleme vermieden und die Arbeitsbelastung der Systemintegratoren verringert. Ein weiteres interessantes Entwicklungsgebiet ist das Bin-Picking (Griff in die Kiste) mittels 3D-Vision für die flexible Beschickung.
Alexander Mühlens (Igus): Unser Ansatz ist, gerade im Bereich Low-Cost-Automation, möglichst viele Maschinenbaukomponenten zu finden, die sich mit tribologisch optimiertem Kunststoff realisieren lassen – mit allen technischen Herausforderungen, die dabei auftreten. Nach Linearführungen, Gewindetrieben und Schneckengetrieben haben wir ein neues Wellgetriebe aus Kunststoff entwickelt.
Die bekannten Lösungen basieren in der Regel auf metallischen Werkstoffen. Mit Kunststoffen erreichen wir nicht die gleichen mechanischen Kennwerte, dafür können wir aber leichter, kompakter und schmiermittelfrei arbeiten und haben zugleich eine hohe Designfreiheit. Damit die Kunststoffe ihre Vorteile ausspielen können, müssen wir neue Lösungen konstruieren und diese mit unserem Wissen zu Kunststoff verbinden.
Dr. Maik Fiedler (Schmalz): Neben der Automation ist das Thema Kollaboration ein wichtiger Markttreiber. Wir haben für kollaborative Roboter spezielle Vakuum-Erzeuger entwickelt, zum Beispiel für die vollautomatische Handhabung von kleinen Teilen sowie für stationäre Handhabungsaufgaben. Diese arbeiten rein elektrisch. Ebenfalls für den Einsatz an kollaborativen Robotern bauen wir verschiedene Greifer. Dazu gehören unter anderem Flächengreifer mit flexiblem Schaum als Greiffläche, die Kartonagen oder Boxen sicher halten. Wir haben aber auch Greifer für das Handling von empfindlichen Elektronikbauteilen, Glas, Verpackungen oder für den Einsatz im Automobilbau im Programm.
Ein noch relativ junger Trend ist das Bin-Picking, also der automatisierte Griff in die Kiste. Mit dem Vision- und Handling-Set 3D-R bieten wir eine Komplettlösung für Leichtbauroboter, die der Anwender schnell in Betrieb nehmen kann – auch ohne umfassende Robotik-Vorkenntnisse. Er erhält alle erforderlichen Komponenten anschlussfertig geliefert: das passende Anschlussset, den elektrischen Vakuum-Erzeuger, einen Greifer samt Verlängerung zur Anbindung der passenden Sauger sowie das 3D-Kamerasystem und die Software.
Unser Programm umfasst separat erhältliche Bin-Picker, Schnellwechseleinheiten für Sauger und Aktoren oder Schwenkmodule. Mit denen erreicht der Roboterarm selbst die Werkstücke, die in tiefen Kisten oder in den Ecken liegen. Unsere Handling-Sets eignen sich für Cobots unterschiedlicher Hersteller.
Robotertechnik für flexible Produktionslayouts
KEM Konstruktion: Mit welchen Komponenten oder Systemen setzen Sie aktuell Schwerpunkte am Markt?
Hartmann (Bosch Rexroth): Der Trend zu vernetzter Montage und Logistik nimmt Fahrt auf. Oft haben Anwender die Montage bereits mit Robotern effizient automatisiert, aber die Materialbereitstellung erfolgt noch halbautomatisch oder manuell. Bei einer hohen Varianz benötigen die fertigungsnahen Lager heute oftmals noch mehr Platz als die eigentliche Fertigungslinie. Unser Ziel ist es, die Bestände durch eine bedarfsgerechte Intralogistik deutlich zu senken. Das autonom fahrende Active-Shuttle automatisiert – mit den APAS-Assistants – effizient die letzte Meile der Intralogistik bei nicht verketteten Maschinen und ersetzt damit Zwischenlager in der Fertigung.
Otto (Kuka): Seit April werden Roboter unserer Serie KR-Iontec ausgeliefert. Mit einer Reichweite von maximal 3.100 Millimetern verfügen sie über den größten Arbeitsbereich ihrer Klasse. Außerdem ist der Roboter besonders flexibel. Er kann in jeder Einbaulage eingesetzt werden, erlaubt eine Traglastumrüstung bei installiertem Roboter und lässt sich über unsere Motion-Modes-Software-Add-ons sozusagen per Knopfdruck flexibel an verschiedene Produktionsprozesse anpassen. Wir sehen ihn als Roboter für jede Aufgabe in der mittleren Traglastklasse von 30 bis 70 Kilogramm. Besonders gut eignet er sich für mittelständische Unternehmen aus der General Industry.
Wir wollen zudem neue Geschäftsmodelle entwickeln, die mit der digitalen Transformation zusammenhängen und sich darum kümmern, mehr Transparenz in eine Produktionsanlage zu bekommen. Dazu haben wir uns im Bereich IIoT mit der Firma Device Insight verstärkt. Die Firma Visuell Components hilft uns, unsere Produkte und Prozesse noch digitaler einzubinden. Auf unserer digitalen Selfservice-Plattform können Kunden ihr eigenes Kuka-Konto anlegen.
Finke (Mitsubishi Electric): Für die vorausschauende Wartung (Predictive Maintenance) übernimmt Maisart als unsere zentrale KI-Plattform, die Vorverarbeitung des Datenstroms der Sensorik. Diese KI ist, wie gesagt, per Smart-Plus-Zusatzkarte implementiert, welche den Controller CR800 für die Melfa-Roboter der FR-Serie um Rechenleistung und weitere Funktionen erweitert. In puncto Kooperationen setzen wir auf unsere aktuellen Forschungs- und Entwicklungsprojekte zu Cobots und Real Time Robotics.
Lange (Omron): Die Kombination von Cobots mit mobilen Robotern bietet derzeit ein großes Potenzial, zum Beispiel in Form des mobilen Manipulators als neue Art Roboter, der die Vorteile kollaborativer und mobiler Roboter in sich vereint. Er besteht aus einer mobilen Roboterbasis und einem kollaborativen Roboterarm, kombiniert mit einer integrierten Bildverarbeitungstechnologie. Der mobile Manipulator bietet einen Ausblick auf das, was möglich ist, wenn zuvor getrennte Robotersysteme zu einem einzigen System vereint werden. Er ist in der Lage, verschiedene Aufgaben zu erfüllen – einschließlich der Maschinenbedienung, des automatischen Kitting, der Montage, Verpackung und Palettierung, der automatischen Entnahme sowie des Klebens und Versiegelns. Als Teil einer integrierten Produktionslinie kann er je nach Bedarf automatisch für mehrere Aufgaben eingesetzt werden.
Mühlens (Igus): Wir führen vier- und fünfachsige Robolink-Gelenk-armroboter, Parallelkinematiken wie den Delta-Roboter und Portallösungen. Hinzu kommen unser Drygear-Getriebebaukasten Apiro sowie die Einzelgetriebe Robolink D für Roboter und Drehachsanwendungen. Dieses Portfolio wird jetzt um das neue Kunststoffwellgetriebe ergänzt.
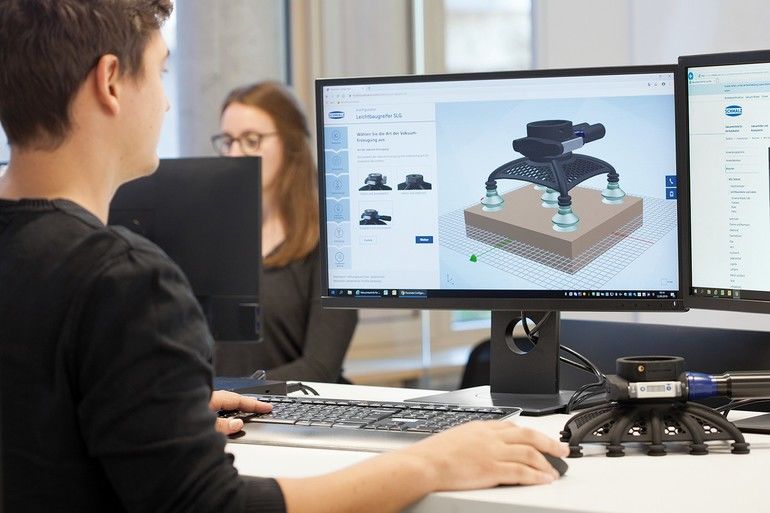
Dr. Fiedler (Schmalz): Wir setzen einen Fokus auf flexible und effiziente Systeme für Leichtbau- und Kollaborationsroboter. Dazu gehören unsere Bin-Picking-Lösungen ebenso wie unsere Leichtbaugreifsysteme. Ein Beispiel dafür ist der SLG. Der Greifer wird vom Anwender online individuell konfiguriert und eignet sich zur automatisierten Handhabung unterschiedlicher Werkstücke. Durch das additive Fertigungsverfahren ist das System äußerst flexibel und kurzfristig verfügbar.
Einen weiteren Schwerpunkt setzen wir mit intelligenten Komponenten. Unsere Smart Field Devices liefern wichtige Informationen, um Prozesse nachhaltig zu verbessern. IO-Link hat sich dabei als standardisierte Schnittstelle für die Kommunikation zwischen der übergeordneten Steuerung sowie der Sensor- und Aktorebene etabliert. Um Anwendern den Überblick über ihre IO-Link-Komponenten zu erleichtern, haben wir die Schmalz-Connect-Suite entwickelt. Ohne in die Steuerung einzugreifen, erlaubt die Software eine Analyse der Daten sowie die Parametrierung der einzelnen Geräte – und zwar über den gesamten Lebenszyklus hinweg. Das funktioniert sowohl bei unseren Smart Field Devices als auch bei Komponenten anderer Hersteller.
Einfache Implementierung und Inbetriebnahme der Robotertechnik
KEM Konstruktion: Wo setzen Sie mit Lösungen zur einfachen Implementierung an?
Hartmann (Bosch Rexroth): Die Einführung von Robotern erfordert heute oft noch komplexe Projekte und eine aufwändige Inbetriebnahme durch Spezialisten. Wir reduzieren diesen Aufwand durch hochflexible autonome Transportsysteme, die ohne Expertenwissen und programmierfrei in Betrieb genommen werden. Am Beispiel des Active-Shuttles wird das deutlich: Zentraler Bestandteil dieses Transportsystems ist ein Management-System. Diese Software kann innerhalb einer Cloudlösung oder auf Servern des Anwenders installiert werden, managt den Materialtransport und ermöglicht darüber hinaus die Vernetzung mit anderen Rexroth-Lösungen wie dem APAS.
An seinem Einsatzort loggt sich der Anwender über die webbasierte Schnittstelle in das Fahrzeug ein. Dann steuert er das Active-Shuttle einmal durch die Umgebung. Während dieser manuell betriebenen ersten Rundfahrt erstellt das Transportsystem mittels Laserscanner eine Referenzkarte, in der Quellen und Senkkoordinaten eingelernt und die Fahrwege angelegt werden. Der Betreiber erledigt diesen Prozess ohne jegliche Programmierungsaufwände. Von da an orientiert sich das AGV selbst, erkennt und kartiert automatisch neue Hindernisse und teilt diese Karte mit allen Fahrzeugen der Flotte.
Otto (Kuka): Ich denke, dass unsere Roboter grundsätzlich einfach zu implementieren und auch zu programmieren sind – und das schon seit vielen Jahren. Man kann unterscheiden, ob man sich eher auf den Endkunden oder auf einen Integrator fokussiert. Und in der General Industry machen wir eben 90 Prozent unseres Geschäftes bei Integratoren. Dennoch haben wir zum Beispiel mit unserem Ready-2-Pilot-System ein Tool für Endkunden entwickelt, mit dem sich Roboter einfach und intuitiv per Handführung programmieren lassen. Das Paket ist schnell am Roboter montiert und ohne aufwendiges Programmieren direkt einsatzbereit. Manuelles Führen des Roboters genügt, um ihn gewünschte Abläufe erlernen zu lassen – ob präzises Schweißen oder grobes Palettieren.
Finke (Mitsubishi Electric): Melfa-Roboter sind von Haus aus einfach zu implementieren. Die Robotersysteme sind bei Auslieferung direkt einsatzbereit. Einheitliche Roboter-Controller, Bediengeräte und eine abwärtskompatible Softwareoberfläche unterstützen unsere industriellen Partner bei einer schnellen Inbetriebnahme.
Beim kollaborativen Ansatz ist die starke Vereinfachung der Bedienung ein zentrales Thema. Hier setzen wir zunächst auf eine ergänzende Softwarekomponente, die beispielsweise eine Programmierung per Drag-and-drop ermöglicht. Bedienkomponenten am Roboterarm und ein visuelles Feedback des aktuellen Roboterzustands helfen auch unerfahrenen Anwendern, den Roboter direkt zu bedienen. Wir arbeiten zurzeit daran, die im industriellen Maßstab grob eingelernten Punkte mittels KI zeit- und wegoptimiert anzufahren.
Lange (Omron): Um ein Beispiel zu nennen: Unsere kollaborativen Roboter sind mit einer integrierten Bildverarbeitungstechnologie ausgestattet. Diese intelligente Lösung für die 3D-Präzisionsführung ermöglicht eine einfache On-the-fly-Positionskalibrierung. Aufgrund der integrierten Bildverarbeitung interagiert der Cobot mit Maschinen ebenso effizient wie ein menschlicher Bediener.
Um den Cobot zu trainieren, kann der Bediener einfach die Markierung des Landmark-Systems irgendwo im Arbeitsbereich anbringen, anhand derer sich die Bildverarbeitung kalibriert. Danach kann der Anwender das System allein mittels Handbewegungen trainieren. Der Cobot merkt sich alle mit der Aufgabe verbundenen Punkte. Die intuitive Programmierung ermöglicht es den Nutzern, eine Aufgabe mit Flow-basierter Software zu automatisieren und vollständige Arbeitsabläufe mittels Click-and-drag zu erstellen.
Mühlens (Igus): Viele Kunden integrieren die Low-Cost-Robotics selbst – aufgrund des überschaubaren Investitionsrisikos. Um die Umsetzung einfacher zu gestalten, bieten wir Robot Control als kostenlose Software zur Programmierung des Roboters an. Für all unsere Roboter-Kinematiken gibt es einen digitalen Zwilling, der wie der reale Roboter programmiert, geteached und ausprobiert werden kann. In die Software kann der Nutzer eigene CAD-Daten von Greifern importieren und eine Automationslösung vorab programmieren. Die Software dient später dazu, den Roboter einfach und intuitiv zu programmieren. Jede Programmierung lässt sich im Nachhinein selbstverständlich auf den realen Roboter anwenden.
Dr. Fiedler (Schmalz): Stellen Sie sich ein komplexes Greifsystem mit unterschiedlichsten Sensoren und Aktoren vor: Die Daten aus dem Greifsystem müssen an einer Stelle zusammengeführt, verarbeitet und dem Anwender möglichst einfach zugänglich gemacht werden – genau das macht Connect Suite. Sie greift Identifikations-, Parameter- und Zustandsdaten aus der Aktor- und Sensorebene ab, analysiert und visualisiert sie. Darüber hinaus lassen sich die Daten über eine Rest-API-Schnittstelle in andere Systeme integrieren.
Damit schlägt die Software eine Brücke zwischen der untersten Feldebene und übergeordneten Applikationen wie einem Bedienpanel oder einem mobilen Dashboard zur Maschinenüberwachung. Sie bildet alle Prozesse – zum Beispiel beim Greifen – digital ab. Der Mehrwert für den Anwender ergibt sich vor allem aus der benutzerfreundlichen Installation, der einfachen Bedienung sowie den Funktionen rund um die Energie- und Prozesskontrolle.
Um in der Produktion für mehr Transparenz zu sorgen, stellen wir zudem verschiedene Apps zur Verfügung. Mit dem Schmalz Control Room etwa lassen sich Vakuum-Komponenten wie der Vakuum- und Druckschalter VSI per Smartphone oder Tablet installieren, parametrieren und bedienen. Das reduziert die Beschaffungskosten, verkürzt die Inbetriebnahme und optimiert den Geräte-Service. Wir unterstützen unsere Kunden auch bei der Konfiguration individueller Leichtbau-Greifer. Innerhalb weniger Minuten ist dieser online über unser Engineering-Tool intuitiv erstellt. Ergänzend zum Greifer liefern wir passende Komplettpakete, die neben den elektrischen Vakuum-Erzeugern alle benötigten Komponenten für die einfache Adaption an den Roboter enthalten – unabhängig vom Hersteller.
Robotertechnik nutzt maschinelles Lernen als KI-Teilbereich
KEM Konstruktion: Wie viel KI steckt bereits in Robotern? Und welches Potenzial sehen Sie in KI-Anwendungen?
Hartmann (Bosch Rexroth): Der produktive Einsatz von künstlicher Intelligenz ist ein wichtiges Thema in der Fabrikautomation. Einer der ersten Anwendungsfälle wird die Kombination von Robotik mit industrieller Bildverarbeitung sein. Hierfür wird Software zunächst über Machine Learning trainiert. In der variantenreichen Fertigung wollen wir noch einen Schritt weitergehen: Künstliche Intelligenz im Produktionsnetzwerk wird zukünftig auch Einzelstücke ohne Teaching erkennen und beurteilen können.
Otto (Kuka): Als ein Teilbereich der KI hilft maschinelles Lernen, Robotersysteme für die flexible Fertigung fit zu machen. Dabei geht es darum, Daten zu interpretieren, Korrelationen zu finden und Informationen abzuleiten. Zwar verbirgt sich hinter KI weit mehr als nur maschinelles Lernen. Allerdings steht diese Teildisziplin derzeit im Zentrum der Aufmerksamkeit. Zweifelsohne konnten jüngste Erfolge im Bereich des maschinellen Lernens, insbesondere im Bereich Computer-Vision verzeichnet werden, was für eine größere Autonomie und Flexibilität von Robotern genutzt werden kann: zum Beispiel zur Objekterkennung, semantischer Szenenanalyse und Greifpunkterkennung als Grundvoraussetzung für intelligentes Verhalten von Robotern. Auch die optimale Parametrisierung von Roboterbewegungen, beispielsweise beim Schweißen oder bei Montagevorgängen, ist eine bereits heute realisierte Anwendungsmöglichkeit.
Finke (Mitsubishi Electric): Intelligente Funktionen, welche die Arbeit mit Robotern vereinfachen und beschleunigen, bieten Melfa-Roboter und die Software RT-Toolbox. Die in den Medien populäre selbstlernende KI ist seit der Einführung der Smart-Plus-Karte mit Maisart-Technologie in der Praxis angekommen.
Lange (Omron): In Form intelligenter Algorithmen wird KI beispielsweise im Flottenmanagement mobiler Roboter eingesetzt. Vielleicht kennen Sie auch unseren mit KI ausgestatteten Tischtennis-Tutor Forheus, der zeigt, wie KI in Kombination mit Bildverarbeitung und Robotik auf der Maschinenebene eingesetzt werden kann. Der Tutor kann ein interaktives Spiel spielen und Tischtennisbälle im dreidimensionalen Raum genauso erkennen, wie es dem Menschen mittels der Augen möglich ist.
Kombiniert wird diese Fähigkeit mit einer Einschätzung des Könnens seines Gegenübers. Anhand dieser Einschätzung passt der Tutor sein Spiel an, um den Menschen optimal zu trainieren. Der KI-Controller sagt das Spiel des Gegners voraus und bewegt als Reaktion darauf seinen Hochgeschwindigkeitsroboterarm. In der Praxis wird die KI bereits in Predictive-Maintenance-Anwendungen mit Robotik und einem KI-Controller eingesetzt. Dabei können Daten zur Analyse der Leistung von Robotern gesammelt werden.
Dr. Fiedler (Schmalz): In unseren Handling-Sets benutzen wir bereits KI, was wir auch weiter ausbauen werden. Ich bin sicher, dass unsere Greifer künftig selbstständig lernen und entscheiden werden. Schon heute ist es möglich, dass ein Kamerasystem mithilfe eines 3D-Sensors das zu greifende Objekt erkennt, die Software den idealen Greifpunkt berechnet und den Roboterarm steuert, um das Bauteil zu greifen. Wir haben unsere Lösung so gestaltet, dass sie die Ziele kollisionsfrei anfährt und die Objekte sicher entnimmt.
Durch KI wird der Greifer erkennen, wie er eine Aufgabe anders lösen muss, falls der erste Greif-Versuch nicht funktioniert. Für dieses Anlernen wird es dann verschiedene Wege geben – zum Beispiel basierend auf CAD-Daten oder Trial-and-Error. Es gilt, den schnellsten, effizientesten Weg zu finden, um die Algorithmen zu trainieren.
Für uns steht beim Thema KI stets im Vordergrund, wie wir den Griff in die Kiste robuster und sicherer gestalten können. Es geht beispielsweise darum, Objekte in ihren Farben und Formen unterscheiden zu können oder dem Bediener das Programmieren und die Inbetriebnahme zu erleichtern. Es geht uns nicht mehr nur um den Greifer, sondern vielmehr um die Gesamtlösung. Wir legen den Fokus auf das System, das aus Greifer, Kamera und Software besteht.
Bosch Rexroth AG
Zum Eisengießer 1
97816 Lohr am Main
Tel.: +49 (0)9352-18 0
E-Mail: imprint@boschrexroth.de
Website: www.boschrexroth.com
9352-18 0")
KUKA Aktiengesellschaft
Zugspitzstraße 140
86165 Augsburg
Tel.: +49 821 797-50
E-Mail: kontakt@kuka.com
Website: www.kuka.com
Mitsubishi Electric Europe B.V.
Mitsubishi-Electric-Platz 1
40882 Ratingen
Tel.: +49 2102-4860
E-Mail: pr@meg.mee.com
Website: www.mitsubishielectric.com
OMRON Europe B.V. Inspection Business Europe
Zilverenberg 2
5234 GM ’s-Hertogenbosch
Niederlande
Tel.: +31 73 648-1811
E-Mail: AOI_info@omron.com
Website: www.industrial.omron.de
igus GmbH
Spicher Str. 1 a
51147 Köln
Tel.: +49 2203-96490
E-Mail: info@igus.de
Website: www.igus.de
J. Schmalz GmbH
Johannes-Schmalz-Str. 1
72293 Glatten
Tel.: +49 7443 2403-0
E-Mail: schmalz@schmalz.de
Website: www.schmalz.com
Teil 1 ist in KEM Konstruktion, Ausgabe 5/2020, sowie online auf
erschienen.
 Volker Hartmann, Leiter Sales & Engineering Intralogstik und Robotik, Bosch Rexroth AG
Volker Hartmann, Leiter Sales & Engineering Intralogstik und Robotik, Bosch Rexroth AGBild: Bosch Rexroth
„Die entscheidenden Differenzierungsmerkmale in der Robotik sind in Zukunft Sensorik, Software, Vernetzbarkeit und die einfache Handhabung ohne Expertenwissen.“
 Michael Otto, Chief Regional Officer Germany, Kuka
Michael Otto, Chief Regional Officer Germany, KukaBild: Kuka
„Wir wollen neue Geschäftsmodelle entwickeln, die mit der digitalen Transformation zusammenhängen und sich darum kümmern, mehr Transparenz in eine Produktions-anlage zu bekommen.“
 Michael Finke, Produkt Manager Robotik, Mitsubishi Electric Industrial Automation
Michael Finke, Produkt Manager Robotik, Mitsubishi Electric Industrial AutomationBild: Mitsubishi Electric
„Hochaktuell ist das Trendthema KI in der Robotik. Hier verfolgen wir mehrere Ansätze. Zum Beispiel wird durch die Analyse von in Echtzeit erfassten Betriebsparameterwerten ein Wartungsbedarf ermittelt, bevor er anfällt.“
 Peter Lange, Business Development Manager Robotics, Omron Europe
Peter Lange, Business Development Manager Robotics, Omron EuropeBild: Omron
„Die Kombination von Cobots mit mobilen Robotern bietet großes Potenzial – zum Beispiel in Form des mobilen Manipulators als neue Art Roboter, der die Vorteile kollaborativer und mobiler Roboter in sich vereint.“
 Alexander Mühlens, Leiter Automatisierungstechnik, Igus
Alexander Mühlens, Leiter Automatisierungstechnik, IgusBild: Igus
„Mit Kunststoffen erreichen wir nicht die gleichen mechanischen Kennwerte, dafür können wir aber leichter, kompakter und schmiermittelfrei arbeiten und haben zugleich eine hohe Designfreiheit.“
 Dr. Maik Fiedler, Leiter Geschäftsfeld Vakuum-Automation, Schmalz
Dr. Maik Fiedler, Leiter Geschäftsfeld Vakuum-Automation, SchmalzBild: Schmalz
„In unseren Handling-Sets benutzen wir bereits KI, was wir auch weiter ausbauen werden. Ich bin sicher, dass unsere Greifer künftig selbstständig lernen und entscheiden werden.“








{kind=link}