

Inhaltsverzeichnis
1. Wendig mit gelenkten Rädern
2. Jüngstes Antriebsmodul benötigt weniger Bauraum
3. Helfer auf wendigen Rädern
Die meisten kommerziell verfügbaren Roboter-Plattformen nutzen bisher Differentialantriebe oder Dreiradkinematiken. Diese haben jedoch den Nachteil, dass mit ihnen eine Orientierungsänderung während des Fahrens und insbesondere ein Fahren seitwärts nicht möglich ist. Erst der Einsatz omnidirektionaler Antriebe bietet die geforderte Flexibilität. Roboter mit omnidirektionalem Fahrwerk sind in der Lage, auch in engen, verwinkelten Umgebungen, ohne lästige Rangierbewegungen an ihr Ziel zu gelangen. Das Fraunhofer IPA setzt deshalb seit langem auf Antriebsmodule mit gelenkten Standardrädern.
Wendig mit gelenkten Rädern
Die Nutzung mehrerer angetriebener und gleichzeitig gelenkter Räder hat gegenüber herkömmlichen Spezialrädern wie z. B. Mecanum-Rädern einige wichtige Vorteile: So ist ein sicherer Vortrieb auch bei glattem oder gar losem Untergrund gewährleistet. Durch die große Kontaktfläche mit dem Boden lassen sich hohe Traglasten und ein ruhiger, geräuscharmer Lauf realisieren. Darüber hinaus können Material und Elastizität der Reifen leicht an den jeweiligen Einsatzbereich angepasst werden.
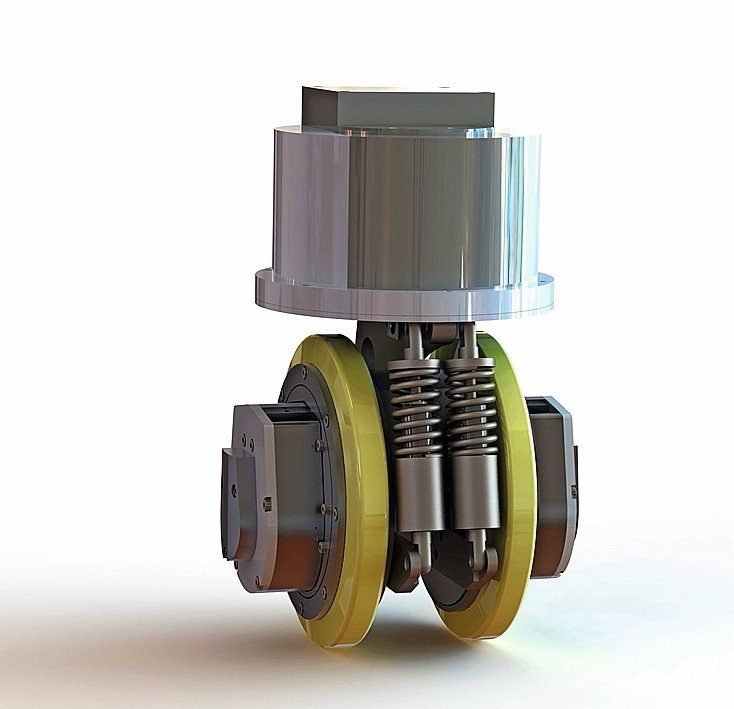
Entscheidende Faktoren für den Aufbau einer kompakten mobilen Plattform sind die vom Boden aus gemessene Höhe des eingesetzten Fahr-Dreh-Moduls und der benötigte Raum für eine volle Umdrehung um die Hochachse. Um hier gute Werte zu erreichen, wird ein Nabenantrieb mit integrierter Getriebeeinheit verwendet. Dieser fasst Motor, Resolver, Bremse und Planetengetriebe in einem Gehäuse zusammen. Der Abtrieb erfolgt über eine zentrisch auf der Drehachse angeordnete Reifenbandage. Der Regler für den Servo-Direktantrieb und die für die Ansteuerung der Bremse nötige Elektronik sind in den Schaft des Fahr-Dreh-Moduls integriert, so dass auch hier Bauraum gespart wird. Die Anschlüsse für die Stromversorgung (48 V Leistungs- und Logikspannung) und die CAN-Bus-Schnittstelle werden mit Hilfe einer Drehdurchführung oben aus dem Fahr-Dreh-Modul herausgeführt. Dies ermöglicht beliebige Lenkbewegungen ohne ein Verdrillen der Kabel. Zur Lenkung des Antriebsmoduls wird ein externer Servomotor verwendet. Der Antrieb erfolgt über einen Riemen am Schaft des Moduls. Eine weitere Besonderheit der Antriebsmodule stellt die integrierte Federung dar. Sie schützt die im Schaft enthaltene Reglerelektronik und den gesamten Aufbau des Roboters vor Stößen und verbessert den Kontakt zwischen Rad und Boden.
Ein einzelnes Antriebsmodul ist für Traglasten zwischen 40 kg und 65 kg geeignet: Für die Integration in eine kompakte, omnidirektinale Roboterplattform sind die vier verwendeten Fahr-Dreh-Module möglichst kompakt, verfügen aber dennoch über die nötige Leistung zum Antrieb der Plattform. Die Getriebeübersetzung der Antriebsmotoren liegt dabei bei 21, das Spitzenmoment bei 40 Nm. So können Geschwindigkeiten bis 1,5 m/s erreicht werden. Die Lenkantriebe verfügen über ein Spitzenmoment von 9 Nm. Durch ihre modulare Bauweise erlauben die kompakten Fahr-Dreh-Module die Konstruktion beliebiger omnidirektionaler Plattformen nach dem Baukastenprinzip. Durch die Wahl einer anderen Getriebeübersetzung kann das Verhältnis zwischen Drehzahl und Drehmoment auf den jeweiligen Anwendungsfall angepasst werden. Bei Bedarf ist selbstverständlich auch die Verwendung stärkerer Antriebsmotoren in der Radnabe möglich.
Jüngstes Antriebsmodul benötigt weniger Bauraum
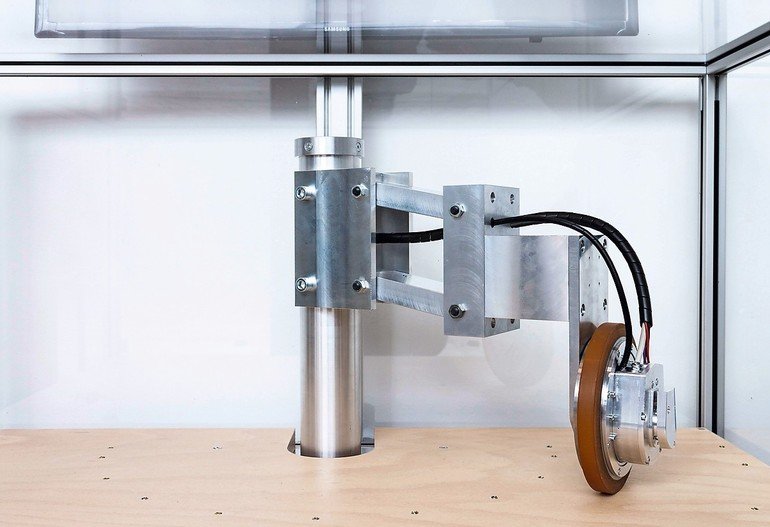
Die dritte und neueste Generation omnidirektionaler Antriebe stellt das Fraunhofer IPA auf der diesjährigen Automatica vor. „Weil fahrerlose Transportsysteme Lasten unterfahren und aufnehmen sollen, müssen sie möglichst flach sein,“ betont Diplom-Ingenieur Theo Jacobs, der das neueste Antriebsmodul konstruiert hat. Es kommt mit einem sehr geringen Bauraum oberhalb des Rades aus, ist aber dennoch mit einer vollwertigen Federung ausgestattet. Mit zwei parallelen Rädern pro Modul wird eine hohe Leistungsdichte erreicht: Bei Bedarf steht die vollständige Motorleistung für den Vortrieb zur Verfügung. Durch unterschiedliches Ansteuern der beiden Räder lässt sich eine Drehung des Moduls erreichen – ein zusätzlicher Lenkmotor entfällt. Auf der Messe präsentiert Jacobs die neueste Version der Antriebsmodule auf einem Teststand, mit dessen Hilfe Dauertests auf verschiedenen Untergründen und mit verschiedenen Bodenunebenheiten durchgeführt werden können. kf
Details zu den Antriebskonzepten für Serviceroboter:
http://hier.pro/xbJEr
Automatica 2018: Halle A4, Stand 421
PLUS
Helfer auf wendigen Rädern
Die vom Fraunhofer IPA entwickelten Systeme Care-O-bot- und rob@work (Bild) nutzen für die Navigation eine omnidirektionale Plattform mit vier gelenkten und angetriebenen Rädern. Diese Kinematik ermöglicht es ihnen, sich auf der Stelle zu drehen, vorwärts, rückwärts oder seitwärts zu fahren und damit auch enge Passagen sicher zu passieren. Dabei sind die Roboter zudem in der Lage, selbstständig einen optimalen, kollisionsfreien Weg zu einem gegebenen Ziel zu errechnen und zu verfolgen. Auftretende Hindernisse wie Möbelstücke oder Personen werden mit Hilfe von Sensorik erkannt und von den Robotern automatisch umfahren.
 rob@work wurde als flexibler Assistenzroboter für Produktionsumgebungen konzipiert
rob@work wurde als flexibler Assistenzroboter für Produktionsumgebungen konzipiertBild: Fraunhofer IPA







{kind=link}