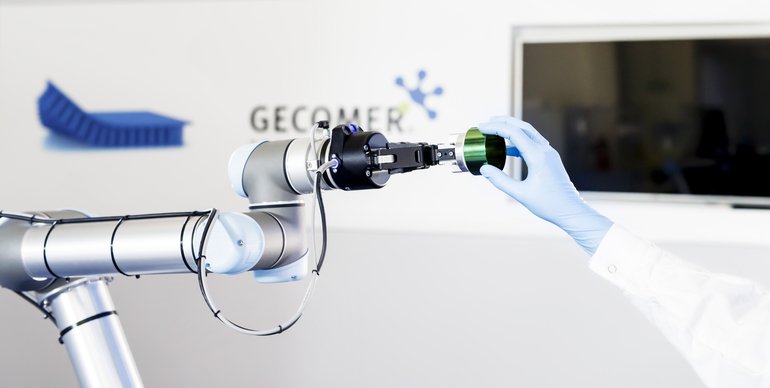
Wissenschaftler des INM – Leibniz-Institut für Neue Materialien – präsentieren nun erstmals einen Cobot, der mit mikrostrukturierten Oberflächen für die Handhabung von Objekten ausgestattet ist. Damit wurde erstmals die Gecomer-Technologie in einem kollaborativen Roboter implementiert. Die Haftsysteme bestehen aus einem hochelastischen Material. Das Greifen und Ablösen von Objekten wird durch intelligente Oberflächenstrukturen beeinflusst. Dadurch können Anwender auf spitze Greifer oder Pinzetten verzichten. Objekte können im Produktionsprozess transportiert und abgelegt werden, ohne dass Verletzungen von Menschen oder Schäden an den Objekten entstehen. Da diese Strukturen sehr weich sind und keine scharfen Ecken oder Kanten haben, wird das Verletzungsrisiko für den Menschen weiter reduziert. Die Haftststrukturen eignen sich besonders für empfindliche Teile, wie zum Beispiel Geräte für die Automobil-, Halbleiter- und Displayindustrie. Unabhängig davon, ob die Strukturen in Cobots oder in Robotern eingesetzt werden, haben die Forscher des INM nicht nur die Eignung der Gecomere in verschiedenen industriellen Umgebungen nachgewiesen. Im Innovationszentrum des INM wurde auch ein Rolle-zu-Rolle-Prozess entwickelt, der es ermöglicht, die Haftstrukturen in großen Mengen mit geringen Kosten herzustellen. eve
Hannover Messe 2019: Halle 5, Stand C54







{kind=link}