


Inhaltsverzeichnis
1. Leitfaden für effiziente Roboter
2. Nebenzeiten reduzieren
3. Ganzheitlich programmierbare Fabrik
In den vergangenen Jahren hat die Verbreitung von Robotik stark zugenommen. Weltweit sind bereits über zwei Millionen Einheiten im Einsatz, die Prognosen der International Federation of Robotics gehen von über 3,5 Millionen bis zum Jahr 2020 aus. Das liegt einerseits daran, dass der Wettbewerbsdruck die Unternehmen zwingt, Fertigungsprozesse zu automatisieren. Anderseits haben sich Industrieroboter zu standardisierten Produktionsmitteln entwickelt, die sich auch infolge einer immer benutzerfreundlicheren Bedienung neue Anwendungsgebiete erschließen. Die Verbreitung der Roboter ist nicht mehr nur auf große Unternehmen der Automobil- und Elektroindustrie beschränkt, sondern vollzieht sich auch in anderen Branchen und zunehmend auch in kleinen und mittelständischen Unternehmen: Wie das Statistische Bundesamt auf dem Digitalgipfel in Nürnberg mitteilte, nutzte 2018 im verarbeitenden Gewerbe nahezu jedes sechste Unternehmen in Deutschland mit mindestens zehn Beschäftigten schon Industrie- oder Serviceroboter. Bei Unternehmen mit 50 bis 249 Beschäftigten beträgt der Anteil 24 %, ab 250 Beschäftigten bei 53 %. Aber auch bei 10 % der kleinen Firmen mit 10 bis 49 Mitarbeitern wird Robotertechnologie inzwischen verwendet.
Der zunehmende Einsatz von Robotern trägt aber auch zu einem steigenden Energieverbrauch in der Produktion bei. Daher wird es künftig notwendig sein, automatisierte Anlagen nicht nur auf ihre Leistung, sondern verstärkt auch hinsichtlich ihrer Energieeffizienz zu betrachten. Ein Ansatz dafür besteht in einer entsprechenden Programmierung der Roboter. Das Institut für Produktionstechnik (IPT) der Ostfalia Hochschule für angewandte Wissenschaften in Wolfenbüttel hat dazu in Kooperation mit der Volkswagen AG in Wolfsburg untersucht, wie sich das energetische Verhalten eines realen Industrieroboters in Abhängigkeit von unterschiedlichen Einflussgrößen verändert. Dazu wurde ein eigens konstruierter Lastendummy genutzt, mit dem sich unterschiedliche Massen, Trägheitsmomente und Schwerpunkte abbilden lassen. Die Roboterprogramme stammen aus dem VW-Karosseriebau, außerdem wurde die AIDA-Referenzbahn verwendet. Dabei handelt es sich um einen standardisierten Bewegungsablauf, der von der Automatisierungsinitiative deutscher Automobilhersteller (AIDA) entwickelt wurde. „Hebt der Mensch eine Last am ausgestreckten Arm, strengt ihn das mehr an, als der gleiche Hubvorgang näher am Körper. Das gilt natürlich auch für Roboter, in der Programmierung wird das aber noch selten berücksichtigt“, verdeutlicht Nils Petersen, Wissenschaftlicher Mitarbeiter für Robotik und Energieeffizienz an der Ostfalia.
Leitfaden für effiziente Roboter
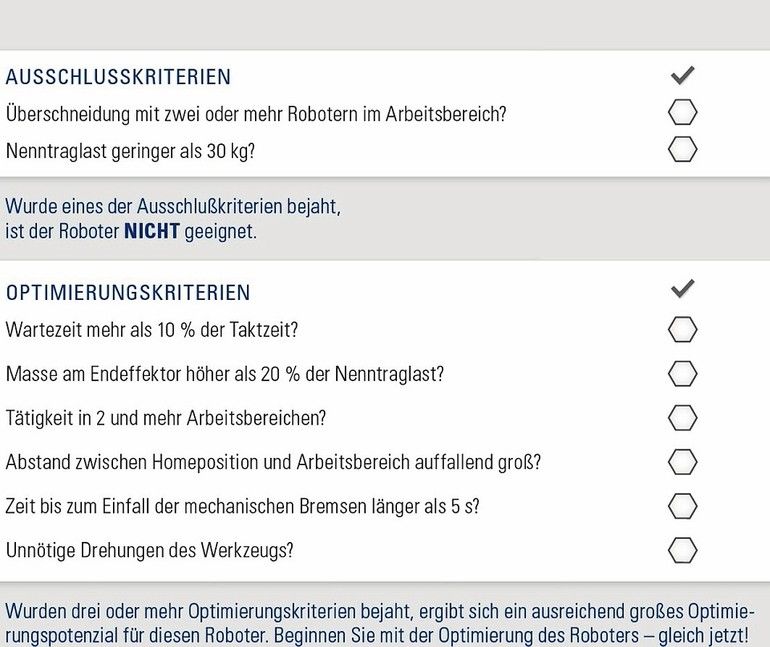
Um mit dem Roboter möglichst effizient zu arbeiten, empfehlen die Forscher, dass dieser für seine Aufgabe nicht überdimensioniert sein sollte, zudem muss das Werkzeug mit betrachtet werden. Von vornherein zu klein für eine Optimierung sind Roboter, die weniger als 30 kg Nenntraglast aufweisen, da die Effekte hier zu gering ausfallen. Soll eine bestehende Anlage optimiert werden, so sollte das zu tragende Gewicht mehr als etwa 20 % der Nenntraglast ausmachen. Denn große Roboter, die lediglich eine geringe Masse am Endeffektor befestigt haben, verbrauchen zu wenig Energie, um für eine nachträgliche Optimierung in Frage zu kommen. Als zu aufwändig sehen die Experten eine Optimierung zudem, sobald es eine Überschneidung mit zwei oder mehr Robotern im Arbeitsbereich gibt, denn so bedeutet das Verändern des einen Programms auch immer eine Überprüfung der weiteren Programme auf Kollisionsfreiheit. Wird jedoch eine Anlage neu geplant, kann schon die Positionierung des Roboters entscheidend sein. Dafür ist im Rahmen des Projekts das Softwaretool Erop (kurz für Energy Efficient Robot Positioning) entstanden, welches als Add-on für Siemens Process Simulate zur Verfügung steht, um die Position des Roboters hinsichtlich des Energieverbrauchs zu optimieren.
Anschließend ist die Bahngestaltung vor allem hinsichtlich ihrer Länge zu untersuchen. Dabei sollten möglichst wenig Zwischenpunkte gesetzt werden. Bei der Bewegungsart ist zu dem auf eine harmonische und nicht abgehakte Bewegung zu achten. Als Indikator für eine energieineffiziente Bewegung gilt es, das Roboterwerkzeug zu betrachten: Muss dieses während des Bahnablaufs viele, offensichtlich unnötige Drehungen vollziehen, zeigt das ein erhöhtes Einsparpotenzial. Die Home-Position – der Ausgangspunkt der Roboterbewegung – sollte außerdem nicht zu weit entfernt vom eigentlichen Arbeitsbereich gesetzt sein, denn der An- und Abfahrweg stellt keinen wertschöpfenden Prozess dar und ist oft von nicht unbedeutender Länge.
Nach Erkenntnis der Wissenschaftler haben Geschwindigkeit und Beschleunigung mit den größten Einfluss auf den Energieverbrauch. Praxisversuche haben gezeigt, dass die bisher erläuterten Schritte meist zu Zeiteinsparungen geführt haben. Somit lassen sich die Geschwindigkeit und Beschleunigung auch ohne Verlust der Taktzeit reduzieren. Ebenfalls angepasst werden können diese Faktoren, wenn der Roboter seine Tätigkeit schneller als der eigentliche Takt verrichtet und so Wartezeiten entstehen, die durch langsamere Bewegungen kompensiert werden könnten. Lassen sich diese prozessbedingt nicht vermeiden, lohnt ein Blick auf die mechanischen Bremsen: Der Energieverbrauch sinkt je nach Länge, die der Roboter gebremst verweilt, weshalb die Bremsen möglichst zeitnah nach Stillstand des Roboters einfallen sollten. Häufig geschehe das aber erst nach 20 Sekunden. Durch die Entlastung der Motoren kann Energie gespart werden, weshalb untersucht werden sollte, ob nicht ein früherer Bremseinfall möglich ist. „Die Untersuchungsergebnisse aus mehreren Praxisprojekten flossen in einen Leitfaden. Mit dessen Maßnahmen konnten aktuell bis zu 30 % Energie eingespart werden“, sagt Petersen.
Nebenzeiten reduzieren
Auch die Cenit AG will Industrieroboter effizienter machen und fokussiert sich dabei auf das computergestützte Teachen der Geräte. Denn einerseits werden in Branchen wie der Land- und Baumaschinenindustrie die Ansprüche hinsichtlich der Prozesse höher, gleichzeitig bleiben die Losgrößen klein, da immer individueller gefertigt wird. Manuelles Handschweißen ist hier daher durchaus noch übliche Praxis. Denn ein Roboter, der häufig umprogrammiert werden muss, verbringt viel Zeit im Stillstand, gerade bei komplexen Bahnen wie etwa beim Schweißen oder dem Laserschneiden. Um auch in solchen Fällen den Einsatz von Robotern zu ermöglichen, muss das Teachen effizienter gestaltet werden: „Aktuell geschieht das häufig noch direkt an der Anlage über das Bedienterminal, die einzelnen Positionen müssen in Schleichfahrt manuell angefahren und gespeichert werden“, weiß Leo Bartevyan, IT System Engineer bei Cenit. „In der zerspanenden Fertigung ist seit langem keine großflächige manuelle Programmierung mehr üblich. Hier gibt das digitale Bauteil in Form der CAD-Daten die Programmierung selbst vor, der Code wird in der CAE-Abteilung dann automatisch für die jeweilige Maschine generiert. Das wollen wir auch für die Roboter ermöglichen.“ Ganz neu ist die Idee nicht, erste Gedanken dazu hatte man bereits vor über 30 Jahren. Wirklich notwendig wurde das effiziente Teachen aber nie wirklich, da Roboter einmal angelernt und dann nur in großen Fabriken mit sehr hohen Stückzahlen rentabel eingesetzt wurden. Hier war eine häufige Umstellung der Produktion eher selten und im Fall des Falles auch entsprechend kompetentes Fachpersonal vorhanden. Nun unterstützen die „eisernen Knechte“ aber immer öfter auch die Produktionsanlagen von kleinen und mittelständischen Unternehmen oder sollen in großen Fertigungsstraßen auch für kleinere Losgrößen genutzt werden. Dabei wachsen zwangsläufig die Stillstandszeiten, da der Roboter öfter auf neue Teile angelernt werden muss. Daher soll nun auch diese Programmierung „offline“ – also nicht mehr direkt am Roboter – stattfinden.
Digitale Zwillinge von Robotern zur virtuellen Programmierung und Simulation am Rechner sind natürlich inzwischen möglich und in der Branche auch verbreitet. Um einen spezifischen Schweißprozess neu am Roboter einzuführen, benötigt man daher theoretisch einen Spezialisten im Fachgebiet Schweißen, der auch Kompetenz in der Roboterprogrammierung mitbringt, praktisch sind solche Ingenieure am Arbeitsmarkt aber sehr rar. Daher muss der Teach-Prozess stark vereinfacht werden, hier setzt die Offline-Programmierung an, sie kann auch beim Training helfen. Bisher verfolgen die Programmiersysteme den Ansatz, eine Anlage und deren Steuerung möglichst exakt virtuell abzubilden. Diese Werkzeuge orientieren sich jedoch stark an den herstellerspezifischen Eigenschaften und sind daher kaum untereinander kompatibel. Ein Experte aus der Maschinenprogrammierung kann daher nicht einfach die Programmierung einer Roboteranlage übernehmen und umgekehrt. Zudem kommen laufend neue Hersteller – oft mit eigenen Steuerungen – auf den Markt. „Anstatt einen Roboter klassisch zu programmieren, kann das zu fertigende Bauteil mit allen bereits vorhandenen Daten auch hier herangezogen werden“, erklärt Bartevyan.
Die Herleitung einer exakten Position oder Kontur aus einer CAD-Struktur ist heute schon gängige Praxis. Denn Konturen, Bohrungen und Verbindungselemente sind in den digitalen Zeichnungen bereits hinterlegt. Warum Roboterprogramme also von Hand erzeugen, wenn man diese Angaben nutzen kann, um die Programmierung zu automatisieren? Durch die Kombination von Konstruktionsdaten, dem Ist-Abgleich über Scanner- und Bilderfassungssystemen sowie weiteren Sensoren will man große Teile der Programmierarbeit voll automatisieren. Schon der Konstrukteur wählt dann die entsprechenden Technologien aus, mit denen bearbeitet wird. „Die Offline-Programmierung ist oft mit nur wenigen Mausklicks angelegt. Dabei entsteht ein unmittelbar ausführbares Roboterprogramm in der Syntax der spezifischen Steuerung inklusive aller Signale, proprietären Befehle und Makros. Bei Konturen und Oberflächen ist der Zeitgewinn noch signifikanter“, versichert Bartevyan.
Eine prozessorientierte Beschreibung ersetzt dabei die Programmierung. Sie erfolgt auf einer neutralen Ebene und in einer universellen Sprache. Das fertige Ergebnis wird dann automatisiert in ein ausführbares Roboterprogramm der spezifischen Steuerung konvertiert. Die Syntax inklusive aller proprietären Befehle und Zyklen wird dabei exakt übertragen und ausgeführt. Nach der Übertragung auf den Roboter sind dort lediglich Kalibrierung und letzte Feinjustierungen nötig. So sollen künftig die Konstrukteure oder Fachingenieure wie Schweißexperten entsprechende Roboter in der Fertigung einrichten können, ohne dafür sehr tief in die Programmierung eintauchen zu müssen.
Ganzheitlich programmierbare Fabrik
Die Experten von Cenit sehen den Rahmen dabei noch größer und schätzen, dass klassische Systeme nicht nur beim Roboter, sondern bei allen Maschinen und Anlagen zeitnah durch interdisziplinäre und einfachere Prozessbeschreibungen abgelöst werden, die für jeden Prozess, für jeden Roboter und für jede Maschine ein und dieselbe universelle Sprache nutzen. Zusammen mit dem Fraunhofer-Institut für Produktionstechnik und Automatisierung (IPA) und der Dürr Systems AG hat man zudem kürzlich eine Machbarkeitsstudie zum Einsatz künstlicher Intelligenz bei der Roboterofflineprogrammierung abgeschlossen. Dafür koppelte das Team ein neurales Netzwerk mit einem digitalen Anlagenzwilling und untersuchte verschiedene Methoden des Maschinenlernens auf Machbarkeit und Wirkungsgrad bei der Unterstützung in der Berechnung komplexer Roboterbewegungen für Karosserielackierprozesse. Trainiert wurde die KI mit Roboterprogrammen der letzten 20 Jahre. Das Ergebnis ist vielversprechend: Die KI-gestützte Kollisionsvermeidung und Bahnplanung reduzierte die Programmierzeit zwischen 30 und 40 %. „In einer digital transformierten Welt spielt es keine Rolle mehr, ob Material getrennt, gefügt oder disponiert wird. Genauso wie es keinen Unterschied mehr macht, ob dieser Schritt von einem Werker, einer Maschine oder einem Roboter ausgeführt wird“, prophezeit Bartevyan. „In einer modernen Produktion verschmelzen die Fertigungsebenen. Ein Bauteil wird per Laser geschnitten, mit Lichtbogen geschweißt und anschließend mit einer Sprühapplikation lackiert. Warum soll man künftig noch diverse Programmiersysteme in unterschiedlichen Prozessebenen einsetzen, wenn man alles auf einer einzigen Plattform erledigen kann?“
CENIT AG
Industriestraße 52-54
D-70565 Stuttgart
Tel.: +49 711 7825-30
Fax: +49 711 7825-4000
E-Mail: info@cenit.de
www.cenit.com
Sprecher des Vorstands: Dipl.-Ing. Kurt Bengel
Ostfalia Hochschule für angewandte Wissenschaften
– Hochschule Braunschweig/Wolfenbüttel
Körperschaft des öffentlichen Rechts
Salzdahlumer Str. 46/48
38302 Wolfenbüttel
E-Mail: info@ostfalia.de
Tel: 05331-939-0
Fax: 05331-939-14624
Das IPT unterstützt Unternehmen bei der Energiereduzierung ihrer Industrieroboter. Der entwickelte Leitfaden steht als Broschüre zur Verfügung:

Hier finden Sie mehr über:






{kind=link}