Es dauert nur rund zehn Sekunden und selbst erfahrene Ingenieure müssen genau hinschauen, um zu verstehen, was passiert: Zwei bewegliche Hälften einer Spritzgussmaschine trennen sich und ein Roboterarm fährt heran. Mit Stiften drückt die Maschine 24 kreisrunde Kunststoffbauteile aus ihrer Form, die der Vakuumgreifer des Roboters zeitgleich ansaugt. Der Greifer besteht aus zwei Aluminiumplatten, die sich unabhängig voneinander bewegen können und mit je zwei Pneumatikzylindern sowie zwölf Konturstücken mit integriertem Sauger ausgestattet sind. Die unteren zwölf Konturstücke entnehmen halb fertige Kunststoffbauteile und führen sie dem nächsten Arbeitsgang zu. Die oberen bleiben währenddessen starr; sie transportieren fertig gegossene Bauteile, die sie anschließend auf ein Fließband legen.
Die Werkzeugbau Siegfried Hofmann GmbH aus dem oberfränkischen Lichtenfels entwickelt und produziert den zweiteiligen Vakuumgreifer für einen Automobilzulieferer. Bisher bringt er mit seinen 24 Konturstücken, den zwei beweglichen Aluminiumplatten mit Pneumatikzylindern und einer weiteren Grundplatte ganze 21 kg auf die Waage. Wäre er leichter, so könnte der Roboter, an dem der Greifer montiert ist, sich entweder schneller bewegen, oder bei gleicher Geschwindigkeit weniger Energie verbrauchen. Um das zu erreichen und den Greifer künftig mit 3D-Druckern herstellen zu können, haben ihn Forscher von der Abteilung Leichtbautechnologien am Fraunhofer IPA gemeinsam mit der Firma Hofmann entsprechend optimiert. Der Werkzeug- und Maschinenbauer bringt viel Know-how in den Bereichen Greifersysteme und 3D-Druck mit.
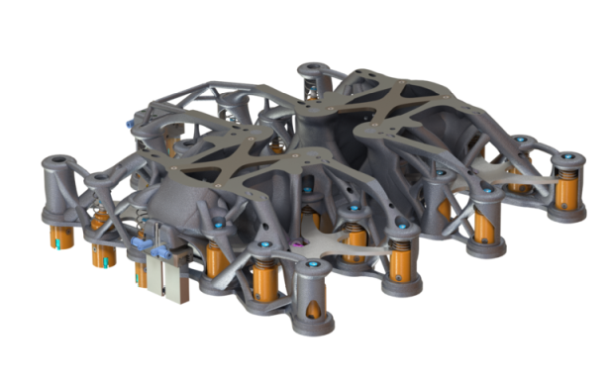
Ein filigranes Gerüst statt massiver Platten
Heraus gekommen ist dabei ein Modell für einen Vakuumgreifer mit völlig neuem Erscheinungsbild: Anstelle der massiven Aluminiumplatten entwickelten Christoph Birenbaum und sein Team ein filigranes, verästeltes Gerüst, das exakt auf diejenigen Kräfte ausgelegt ist, die auf den Greifer wirken, während er die Kunststoffbauteile aufnimmt. „Alles Überflüssige haben wir weggelassen“, verdeutlicht Birenbaum. Die Leitungen zu den einzelnen Saugköpfen haben die Forscher in das Innere des Gerüsts verbannt, weshalb der optimierte Vakuumgreifer nun aufgeräumter aussieht.
Aber auch die Funktionsweise des Greifers haben die Wissenschaftler in diesem Zuge verändert. Die Pneumatikzylinder ersetzten sie durch leichtere Druckfedern, die die 24 Sauggreifer nun einzeln bewegen. Die Stifte, die die Kunststoffbauteile aus ihren Formen in der Spritzgussmaschine drücken, drücken nun auch die Federn ein. Arretierungen halten sie gedrückt, solange der Roboterarm positioniert.
Bis zu 15 Kilo weniger Gewicht
Druckte man den überarbeiteten Vakuumgreifer aus, so brächte er 14 Kilo auf die Waage – sieben Kilo weniger als die ursprüngliche Version. Es wäre sogar eine noch viel größere Gewichtseinsparung möglich: „Wenn man den Greifer nicht aus Aluminium, sondern aus Kunststoff fertigte, wöge er nur sechs Kilo“, sagt Birenbaum. „Unsere Simulationen zeigen, dass auch ein Kunststoff-Greifer den Kräften Stand halten würde, die während der Handhabung auf ihn wirken“. Fraglich sei nur, ob er auf lange Sicht den hohen Temperaturen im Umfeld einer Spritzgussmaschine gewachsen wäre.
Offen ist auch, wie viel Zeit oder Energie sich mit dem abgespeckten Greifer einsparen ließe. „Das lässt sich erst beziffern, wenn wir wissen, an welchen Robotern der Leichtbau-Vakuumgreifer zum Einsatz kommt“, erklärt Birenbaum. An Praxistests führt also kein Weg vorbei, bevor die Firma Hofmann den Greifer serienmäßig produzieren kann. bt








{kind=link}