
Inhaltsverzeichnis
1. Prinzip 1: EMK-Methode mit Nulldurchgang
2. Prinzip 2: Beobachter-basierte EMK-Methode
3. Prinzip 3: Magnetische Anisotropie-Methoden
4. Warum sensorlose Ansteuerung?
5. Drei Hauptgründe für eine sensorlose Ansteuerung
6. Sensorlose Controller
Um einen bürstenlosen Motor anzutreiben, braucht es eine Steuerelektronik für die präzise Kommutierung. Das funktioniert aber nur, wenn die Steuerelektronik stets weiß, in welcher Position sich der Rotor befindet. Klassischerweise liefern im Motor verbaute Sensoren diese Informationen. Doch es geht auch anders. Sensorlose Ansteuerungsverfahren verwenden Strom- und Spannungsinformation aus dem Motor zur Bestimmung der Rotorlage. Aus der Veränderung der Rotorposition lässt sich die Geschwindigkeit herleiten, welche sich auch zur Drehzahlregelung verwenden lässt. Höherentwickelte sensorlose Ansteuerungen können sogar den Strom und die Position regeln. Durch das Weglassen von Sensoren ergeben sich Vorteile: niedrigere Kosten und Platzersparnis. Denn Kabel, Stecker oder elektronische Schaltkreise entfallen. Die sensorlosen Regler von Maxon Motor nutzen drei Grundprinzipien, die auf die BLDC-Motoren des Herstellers abgestimmt sind.
Prinzip 1: EMK-Methode mit Nulldurchgang
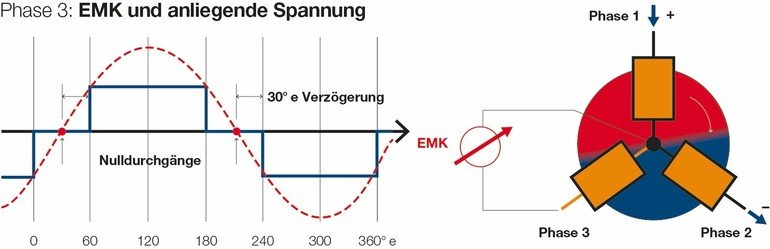
Die EMK-Methode mit Bestimmung des Nulldurchgangs verwendet die induzierte Spannung (oder EMK) in der nicht-bestromten Phase bei Blockkommutierung. Der Nulldurchgang findet in der Mitte des Kommutierungsintervalls statt. Aus den vorhergehenden Kommutierungsschritten kann die Zeitverzögerung zum nächsten Kommutierungspunkt abgeschätzt werden. Die EMK-Methode mit Nulldurchgang funktioniert nur bei genügend hoher Drehzahl – im Stillstand verschwindet die EMK. Der Anlauf des Motors benötigt einen speziellen Anlaufprozess ähnlich einer Schrittmotorsteuerung und muss separat eingestellt werden. Die eigentliche sensorlose Kommutierung ist erst ab Motordrehzahlen von 500-1000 UpM möglich. Zur Drehzahlregelung wird die Frequenz der Kommutierungsschritte verwendet. Die Dynamik ist aufgrund der beschränkten Feedbackinformation limitiert, lässt sich aber durch Integration von Schätzmethoden im Regelalgorithmus (Beobachter, Kalman-Filter …) verbessern. Die EMK-Methode mit Nulldurchgang hat aber auch Vorteile. Grundsätzlich funktioniert sie mit allen bürstenlosen Motorbauarten. Sie ist robust, kosteneffektiv und wird in vielen Standardprodukten verwendet, wie im Escon Module 50/4 EC-S des Anbieters.
Prinzip 2: Beobachter-basierte EMK-Methode
Beobachter- oder Modell-basierte EMK-Methoden nutzen Informationen aus dem Motorstrom, um die Rotorlage und die Drehzahl herzuleiten. Der Modell-basierte Ansatz ergibt eine höhere Auflösung der Rotorposition. Damit ist Sinuskommutierung (oder FOC, möglich mit ihren Vorteilen: höherer Wirkungsgrad, geringere Erwärmung, weniger Vibrationen und Geräusche. Allerdings benötigt auch die Beobachter-basierte EMK-Methode eine Mindestdrehzahl von einigen hundert UpM, um gut zu funktionieren.
Prinzip 3: Magnetische Anisotropie-Methoden
Die auf der magnetischen Anisotropie basierenden Methoden leiten die Rotorlage aus der Motorinduktivität her, welche minimal ist, wenn die magnetischen Flüsse von Stator und Rotor im Rückschluss parallel sind. Dazu werden kurze Strompulse verwendet, die aber keine Motorbewegung verursachen. Verglichen mit den EMK-basierten Verfahren funktioniert diese Methode auch im Stillstand oder bei sehr tiefen Drehzahlen und erlaubt Sinuskommutierung. Die gemessenen Signale sind stark vom Motortyp abhängig. Der Bestimmung der Rotorlage liegt ein Motormodell zugrunde, welches für jeden Motor parametriert und angepasst werden muss. Controller auf Basis von magnetischer Anisotropie sind deshalb hochspezifische Produkte – einfach «plug-and-play» geht nicht. Der Rechenaufwand zur Evaluation der Rotorposition beschränkt die maximal möglichen Drehzahlen.
Warum sensorlose Ansteuerung?
In preissensitiven Anwendungen kann die Verwendung von sensorlosen Motoren die Kosten senken. Typische Anwendungen in diesem Bereich sind Lüfter, Pumpen und andere hochdrehende Anwendungen mit eher tiefer Regelperformance und wo ein kontrollierter Anlauf nicht kritisch ist. Bei hoher Stückzahl ist eine kundenspezifische Anpassung des EMK-basierten Reglers sinnvoll. Kostenersparnis ist nicht der einzige Grund, sich für eine sensorlose Ansteuerung zu entscheiden. Anwendungen wie Tür- oder Bike-Antriebe benötigen eine hohe Regelqualität. Eine ruckfreie Motoransteuerung ab Drehzahl null ist wichtig, aber auch eine hohe Dynamik und Sinuskommutierung zur Geräuschvermeidung. Dies alles soll ohne die Verwendung eines teuren Encoders realisiert werden. In den letzten Jahren haben sich dazu hochwertige sensorlose Ansteuerungen basierend auf der Anisotropie-Methode etabliert. Zum Beispiel die neue High-Performance-Sensorless-Control-Steuerung (HPSC) von Maxon. Der Engineering-Aufwand zur Anpassung der Modellparameter rechtfertigt sich allerdings erst ab Stückzahlen von einigen hundert. Eine sensorlose Ansteuerung kann auch nötig sein in Situationen, wo empfindliche Sensorelektronik beim Motor vermieden werden muss. Man denke an Anwendungen bei hohen oder tiefen Umgebungstemperaturen, Reinigungs- und Sterilisationsmethoden im medizinischen Umfeld, aber auch an ionisierende Strahlung im Weltraum oder in der Medizin.
Drei Hauptgründe für eine sensorlose Ansteuerung
Drei Hauptgründe sprechen für eine sensorlose Ansteuerung: Kostenersparnis, Platzersparnis und feindliche Umgebung für Sensoren. Die EMK-Methode mit Bestimmung des Nulldurchgangs ist weit verbreitet in kostensensitiven Anwendungen, die bei hohen Drehzahlen laufen. Sensorlose Ansteuerung ab Stillstand und bei niedrigen Drehzahlen verlangt nach höher entwickelten Methoden. Der Aufwand zur Implementierung ist größer und schließt Modellbildung und Parametrisierung ein. Kostenersparnis ist eher zweitrangig. Die feldorientierte Regelung ergibt einen höheren Wirkungsgrad und weniger Erwärmung sowie ein niedrigeres Vibrations- und Geräuschniveau. jg
Details zu Escon Module 50/4 EC-S Servokontrollern:
hier.pro/7hr1S
PLUS
Sensorlose Controller
Eine Neuentwicklung von Maxon Motor ist das HPSC Module 24/5 (High Performance Sensorless Control), eine Plattform aus Hardware und kundenspezifischer Software. HPSC ist eine maßgeschneiderte Lösung und deshalb kein Katalogprodukt. Das Spezielle an dieser Entwicklung: Im Stillstand und bei niedriger Drehzahl kommt erst eine Regeltechnik auf der Grundlage der magnetischen Anisotropie zum Einsatz. Dann, bei höherer Drehzahl, folgt ein sanfter Übergang zu einer Beobachter-basierten EMK-Methode. Die Firmware des Moduls wird für jedes Antriebssystem abgestimmt. Mittels eines speziellen Tuningprozesses werden über 120 Parameter automatisch an den «Fingerabdruck» jedes Motors angepasst. Ein Beispiel für den Einsatz der Lösung ist das vom Hersteller neu entwickelte Hand-Tool für den Medizinbereich.

Hier finden Sie mehr über:








{kind=link}