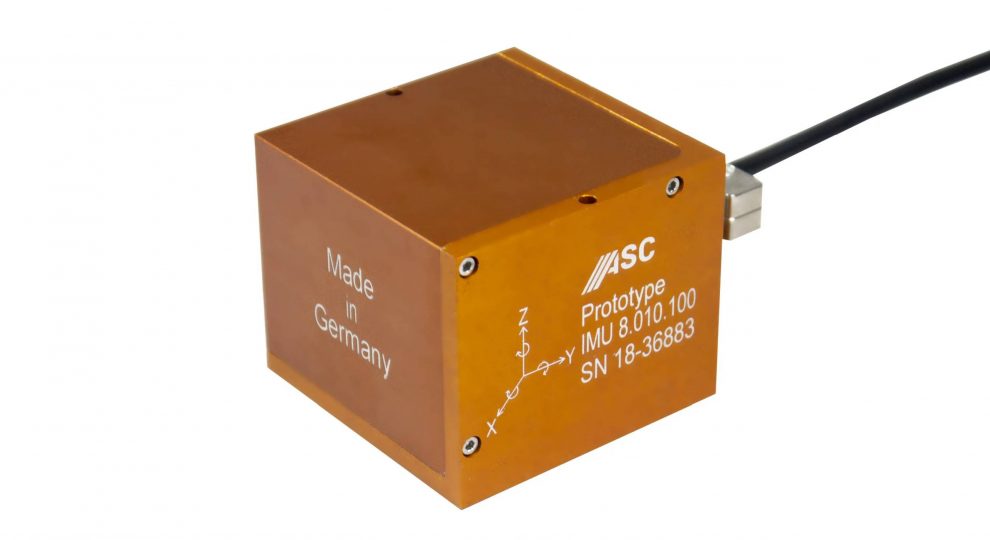
Die neue Inertial Measurement Unit IMU8 von ASC wurde speziell für hochgenaue Positionsbestimmungen entwickelt. Sie ist sehr leistungsstark und eignet sich für zahlreiche Anwendungen.

Wie können Automatisierer KI-Modelle intuitiv entwickeln und in die Steuerung integrieren? Wie lässt sich überschüssige Energie im Antriebsverbund wieder...
Mit einer Bias-Stabilität von 0.12°/hr und einem exzellenten Angular Random Walk von 0,017°/ ist die IMU8 prädestiniert für den Einsatz in der Navigation von Drohnen, Schiffen, Robotern und fahrerlosen Transportsystemen sowie in der Gleislagedatenüberwachung. Darüber hinaus stellt sie ein Hilfsmittel für die Plattformstabilisierung und die Erstellung von Kartenmaterial dar (mobiles Mapping).
Die Grundlage der IMU8 bilden hochgenaue Inertialsensoren wie ein triaxialer Beschleunigungssensor und ein triaxiales Gyroskop. Dank ihrer Langzeitstabilität und niedrigen Rauschverhaltens lassen sich Positionsänderungen in allen 6 Freiheitsgraden zuverlässig und mit hoher Wiederholgenauigkeit erfassen.
Der kapazitive MEMS-Beschleunigungssensor der IMU ist mit Messbereichen von ±2g bis ±30g erhältlich, bietet eine Amplitudenabweichung von <0,5% FSO und ein Signalrauschen von 7µg/√Hz im Messbereich von ± 2g. Das Gyroskop zeichnet sich ebenfalls durch eine geringe Bias-Instabilität und einen exzellenten Angular-Random Walk mit geringem Rauschen aus. Ein geringer In-Run-Bias und ein geringes Rauschen ermöglichen zudem ein genaues Arbeiten mit dem Drehratensensor. Die MEMS-Vibrationsring-Kreisel sind mit den Messbereichen ±100°/s und 200°/s erhältlich. jke






{kind=link}