Ein Roboterassistenzsystem wie Rosy trägt dazu bei, die Interaktion zwischen Mensch und Maschine zu verstärken und zu verbessern. Damit werden Roboter nicht mehr nur dazu genutzt Produk- tionsabläufe zu automatisieren, sondern auch in humanen Bereichen körperlich beeinträchtigte Menschen zu unterstützen.
Exklusiv in KEM Die Autoren: Sebastian Sommer und Michael Emrich sind wissenschaftliche Mitarbeiter am Institut für Betriebs- und Technologiemanagement (IBT) der FH Trier, Trier
Sogenannte Roboterassistenzsysteme übernehmen bestimmte Tätigkeiten, um Menschen zu unterstützen. Diese Tätigkeiten können beispielsweise mit hohen körperlichen Belastungen verbunden sein, welche auf Dauer zu gesundheitlichen Schäden führen können. Oder sie sind sehr monoton oder zu gefährlich um sie von Personen durchführen zu lassen. Im medizinnahen Bereich ist eine weitere denkbare Anwendung die Unterstützung körperlich beeinträchtigter Personen. Das Bundesministerium für Bildung und Forschung (BMBF) sieht deshalb eine große Marktchance in der Einführung von robotergestützten Service- oder Assistenzsystemen. Daher baut es kontinuierlich die Förderung für auf diesem Gebiet durchgeführte Forschungsprojekte aus.
Am Institut für Betriebs- und Technologiemanagement (IBT) der FH Birkenfeld wurde das Roboterassistenzsystem „Rosy“ entwickelt, dessen Grundidee es war, Menschen mit einer körperlichen Behinderung, speziell im Bereich der Arme, im Alltag zu unterstützen. Der Roboter soll dazu einfache Tätigkeiten ausführen, welche diese Menschen nur noch schwer oder gar nicht selbst ausführen können. Er könnte beispielsweise Gegenstände halten oder ablegen, Getränke zum Mund führen oder auch ein Buch umblättern.
Bionisch inspirierte Robotermechanik
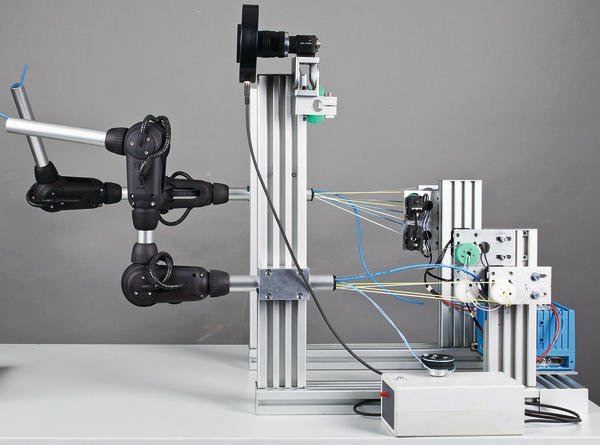
Die Robotermechanik ist bionisch inspiriert, das heißt, sie ist ähnlich aufgebaut und hat etwa die gleichen Bewegungsmöglichkeiten wie menschliche Arme. Dies wurde durch Gelenke erreicht, welche jeweils zwei Freiheitsgrade besitzen. Mit ihnen ist es möglich, eine Kipp- und eine Drehbewegung ähnlich einem menschlichen Unterarm auszuführen. Die Mechanik ist bilateral aufgebaut. Es gibt zwei baugleiche Arme mit jeweils zwei solcher Gelenke. Die Arme können unabhängig voneinander angesteuert werden und so gemeinsame oder unterschiedliche Tätigkeiten ausführen.
Die Gelenke selbst wurden von der Igus GmbH, Köln, entwickelt. Es handelt sich dabei um Gelenke, die durch Seilzüge bewegt werden können. Dies bietet die Möglichkeit, die Aktoren für die Bewegung, zum Beispiel elektrische Servomotoren, außerhalb des Arms anzubringen, sodass sie nicht mitbewegt werden müssen, was den Arm sehr leicht macht. Zum Antrieb wurden kompakte Servomotoren der Robotis Inc., KR-Seoul, verwendet, die über einen seriellen Datenbus angesteuert werden. Die Elektronik für die Positionsregelung ist in den Motoren integriert.
Steuerung durch Bewegungsbefehle
Zur technischen Realisierung der Assistenzsysteme sind außer der Mechanik komplexe Sensorsysteme notwendig, mit deren Hilfe der Roboter flexibel auf seine Umgebung reagieren kann. Dies können beispielsweise Kamerasysteme zum maschinellen Sehen sein.
Die Innovation des hier vorgestellten Systems besteht darin, dass es möglich ist, dem Roboter Bewegungsbefehle durch Gesten, etwa Handzeichen, das Bewegen eines Objekts oder Augenzwinkern zu übermitteln. Die Gesten werden dabei von einer Kamera aufgenommen. Mit einem sogenannten Laserradar, dem LMS400 der Sick AG, Waldkirch, können zusätzlich 3D-Informationen der Umgebung erfasst werden. Die Kamerabilder und die Informationen des LMS400 werden durch eine Software interpretiert und in Sollpositionen für die einzelnen Gelenke umgesetzt. Diese Software wurde am Umwelt-Campus Birkenfeld in einem studentischen Projekt entwickelt. Insbesondere wurden die mathematischen Grundlagen zur Steuerung der Roboterbewegungen aufgestellt und in Software umgesetzt.
Plan A: Formgedächtnis- legierung statt E-Motoren
Durch Weiterentwicklung der Mechanik und der Software ist geplant, Rosy noch leistungsfähiger zu gestalten, um die möglichen Einsatzbereiche zu erweitern. So bietet die verwendete Seilzugtechnik etwa den Vorteil, dass das verwendete Antriebssystem mit recht wenig Aufwand ausgetauscht werden kann. Geplant ist zum Beispiel die derzeit verwendeten Elektromotoren durch sogenannte Formgedächtnismaterialien zu ersetzen. Solche Materialien können nach einer plastischen Verformung erwärmt werden, „erinnern“ sich dann an ihre frühere Form und nehmen diese durch eine Gefügeänderung wieder ein. Die Erwärmung kann dabei zum Beispiel durch einen elektrischen Stromfluss erfolgen. Diese Materialien können im Prinzip dazu benutzt werden, die Seile zu ziehen und so den Roboterarm zu bewegen.
Man kann sich eine ähnliche Arbeitsweise vorstellen, wie bei Muskeln, die Arme und Beine bewegen. Hierzu muss unter anderem getestet werden, welche Kräfte mit den Materialien erzeugt werden können.
Plan B: Sensorik soll Rosy noch vielseitiger machen
Des Weiteren ist geplant, nicht nur die Mechanik zu verbessern, sondern darüber hinaus das Roboter-assistenzsystem Rosy durch geeignete Sensorik vielseitiger zu gestalten. Um das System mit der notwendigen Intelligenz auszustatten, kann dabei nicht auf die Erweiterung der bisher verwendeten Softwareprogrammierung verzichtet werden. Die Weiterentwicklung der Software beinhaltet dabei einen Ausbau der Interaktion mit dem Menschen mittels Bilderkennung und die geeignete Ansteuerung der jeweils verwendeten Antriebstechnik. Mittelfristig ist das Ziel, eine Datenbank mit unterschiedlichen Gesten aufzubauen, die zu verschiedenen Aktionen des Roboters führen. Auch eine direkte Erkennung und Nachahmung von Bewegungen des Menschen ist denkbar.
FH Trier; Telefon: 06782 17-1113;
E-Mail: w.gerke@umwelt-
campus.de
Denavit-Hartenberg definiert Gelenklage

Kinematik
Der Roboterarm besitzt eine serielle Kinematik, das heißt er besteht aus vier hintereinander geschalteten, rotatorischen Gelenken, die mit Hebeln verbunden sind. Die Lage der Gelenke zueinander wird über die sogenannten Denavit-Hartenberg-Parameter definiert. Diese beschreiben Koordinatensysteme, deren z-Achse die Rotationsachsen der Gelenke darstellen. Das letzte Koordinatensystem ist hier gleichzeitig der sogenannte Tool Center Point (TCP). Um ihn auf definierte Positionen zu verfahren, müssen die Verdrehwinkel aller Gelenke berechnet werden. Dies geschieht durch eine sogenannte Rückwärtstransformation, eine mathematische Operation, die für jeden Roboter erst entwickelt werden muss.
Teilen:







{kind=link}