

Viele Bewegungen in Handhabungsmaschinen, der Fördertechnik und in Bearbeitungsmaschinen verlaufen linear. Für die Umsetzung dieser Aufgaben kommen je nach Anwendung unterschiedliche Linearantriebe zum Einsatz. Zu nennen sind Linearmotoren sowie Linearantriebe mit drehendem Motor in Kombination mit Zahnriemen, Spindeln oder Zahnstangen.
Anzeige

Wellenförmige Unterlegscheiben, Spiraldruckfedern, Tellerfedern... Die Liste erprobter Federn, die für eine Vielzahl von Anwendungen in Frage kommen, ist...
Dieser Fachbeitrag stellt im Folgenden die Schwingungseigenschaften und Unterschiede zwischen Linearmotoren und Zahnriemenantrieben aus Anwendersicht dar. Gezielte Sollwertgenerierung ist ein probates Mittel, um Schwingungen im Linearatrieb zu vermeiden. Beispiele sind die Lenze-Servoregler der Reihen ECS und L-force Servo Drives 9400.
Klassifizierung und Verfahrwege der Linearantriebe
Um Linearantriebe für die weitere Betrachtung zu klassifizieren, ist die Unterteilung nach der Länge der Verfahrwege sinnvoll:
- Kurze Wege bis zu einer Länge von 200 mm werden in der Handhabungstechnik mit sehr hohen Geschwindigkeiten und Beschleunigungen zurückgelegt. Beispielsweise bei der Chip- und CD-Herstellung oder der Leiterplattenbestückung sind sehr kurze Taktzeiten mit exakter Positionierung gefordert. Die Metallbearbeitung (Schweißtechnik, Umformen, Klemmen) verlangt hohe Kräfte bei mäßigen Geschwindigkeiten.
- Mittlere Wege bis zu einer Länge von 2500 mm finden sich beispielsweise in Werkzeugmaschinen. Die Anforderung hier: mittlere bis hohe Geschwindigkeiten, hohe Beschleunigungen mit zum Teil hoher Genauigkeit. Verlegeantriebe bewältigen ihre Aufgaben mit hohen Geschwindigkeiten und Beschleunigungen bei mittlerer Genauigkeit. Weitere Beispiele für Linearbewegungen sind das Laserschneiden in der Blechbearbeitung sowie Portalsysteme.
- Lange Wege bis 10 m legen z. B. Regalantriebe, Palettierer, Portale oder Vorschübe an Pressen mit mittleren Geschwindigkeiten, hohen Kräften und mäßiger Genauigkeit zurück.
- Sehr lange bis unbegrenzte Strecken mit mittleren bis hohen Geschwindigkeiten finden sich typischerweise in Regalsystemen oder der Gepäckförderung.
Die dargestellten Rahmenbedingungen belegen, warum im heutigen Maschinen- und Anlagenbau unterschiedliche Antriebsformen zum Einsatz kommen. Bei Linearantrieben mit Zahnriemen und drehendem Motor überträgt der Motor seine Kraft über den Zahnriemen auf die zu bewegende Masse. Hingegen erzeugen Linearmotoren die Kraft für die lineare Bewegung direkt aus dem Zusammenwirken des Motorstromes mit dem Permanentmagnetfeld. Die größte Verbreitung haben Ausführungen mit eisenbehaftetem Aktivteil in Flachbett- oder U-Form-Bauweise.
Eigenschaften der Linearantriebe
Linearmotor: Die Linearmotoren weisen keinerlei Spiel bei gleichzeitig hoher Steifigkeit zwischen Motor und Last auf. Dadurch lassen sich hohe Positioniergenauigkeiten und hohe Verstärkungsfaktoren der Regelkreise verwirklichen. Da keine mechanischen Übertragungselemente vorhanden sind, wird die Geschwindigkeit des Antriebs nur durch die Linearführung und die Energieübertragungskette begrenzt und kann daher entsprechend hoch sein. Da bei Linearmotoren die Kraft für die lineare Bewegung direkt aus dem Zusammenwirken des Motorstromes mit dem Magnetfeld erzeugt wird und keine mechanische Übersetzung vorhanden ist, sind das Volumen und Gewicht des Motors größer als bei rotierenden Motoren. Für die Regelung des Linearmotors ist ein Lineargeber erforderlich, der die Signale für die Strom-, Geschwindigkeits- und Lageregelung zur Verfügung stellen muss. Typische Daten sind:
- Spitzenkraft 100 N bis 10 kN
- Dauerkraft 50 N bis 5 kN
- Geschwindigkeit 2 bis 15 m/s.
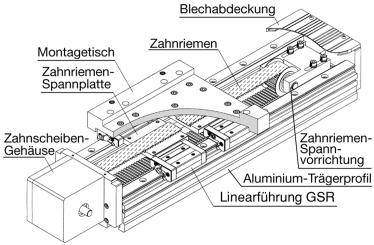
Zahnriemenantrieb: Ein Servomotor treibt direkt oder über ein Getriebe die Zahnriemenrolle und den Zahnriemen an. Dadurch entstehen Spiel und Elastizität zwischen Motor und Last, die die Genauigkeit und Regelgüte des Systems begrenzen. Die mit der Elastizität verbundene Schwingneigung wird durch eine Begrenzung des Frequenzbereichs der Sollwerte und Regelkreise reduziert. Durch die mechanische Übersetzung kann der Aktivteil deutlich kleiner als beim Linearmotor ausfallen. Die hohe Kraftdichte des Zahnriemens lässt Linearteil und Führung im Vergleich zum Linearmotor kleiner ausfallen. Die Drehzahl- und Lageregelung erfolgt indirekt über den im Motor eingebauten Geber. Typische Daten sind:
- Spitzenkraft 200 N bis 5 kN
- Dauerkraft 100 N bis 2 kN
- Geschwindigkeit 1 bis 10 m/s.
Viele Anwendungen in der Handhabungs- und Fördertechnik werden mit Zahnriemenantrieben gelöst. Hier kommen die Synchronservomotoren MCS oder Asynchronservomotoren MCA mit Servo-Umrichtern der Reihen ECS oder 9300 von Lenze zum Einsatz.
Linearmotoren/ Zahnriemenantriebe
Zahnriemenantriebe und Linearmotoren haben aufgrund ihres konstruktiven Aufbaus und des physikalischen Wirkprinzips ihre eigenen Stärken.
Vorteile der Zahnriemenantriebe:
Der gesamte Antrieb ist nach außen unmagnetisch, so dass Eisenpartikel oder ferromagnetischer Staub mit Blick auf die Abdichtung kein besonderes Problem darstellen. Die Genauigkeit der Führung orientiert sich nur an der benötigten Genauigkeit für die Anwendung, so dass für viele Aufgaben einfache Führungen, z. B. mit Strangpressprofilen und Rollen, eingesetzt werden können. Im Gegensatz hierzu sind für Linearmotoren stets genaue Führungen erforderlich, um die Funktion des Motors sicher zu stellen.
Die Führung wird nur durch die Arbeitsmaschine belastet und kann daher eine hohe Lebensdauer erreichen. Dagegen herrscht bei Linearmotoren bei vielen Ausführungen eine hohe Normalkraftbelastung aus dem Motor heraus, die die Lebensdauer der Linearlager begrenzt.
Eine Bremse kann im rotierenden Motor integriert werden und ist daher klein und kostengünstig.
Die Energiezuführung erfolgt in der Regel über starre Zuleitungen. Es tritt kein Verschleiß auf und Wartungskosten entfallen.
Der Motor gibt seine Verlustwärme räumlich getrennt von den bewegten Teilen der Maschine ab, so dass die Motorwärme den Bearbeitungsprozess nicht störend beeinflusst. Das Bauvolumen der mechanischen Übertragung ist im Vergleich zu Linearmotoren klein und ermöglicht den Aufbau kompakter Maschinen. Die Rückführung erfolgt durch einen im Motor integrierten Drehgeber. Dies ist kompakt und kostengünstig. Der Linearmotor weist demgegenüber folgende Vorteile auf:
- Sehr gute Regelbarkeit, da sich das gesamte System praktisch als eine Masse ohne Resonanzen betrachten lässt. Damit sind hohe Verstärkungen möglich
- Sehr hohe Beschleunigungen, da aufgrund der fehlenden Resonanzen weniger Schwingungen angeregt werden, und aufgrund der direkten Krafterzeugung das Durchrutschen von Übertragungselementen vermieden wird
- Sehr hohe Geschwindigkeiten, da kritische Drehzahlen oder kritische Geschwindigkeiten an Übertragungselementen, z. B. Spindel, nicht zu berücksichtigen sind
- Hohe Genauigkeit, da kein Spiel vorhanden ist
- Hohe Laufruhe und -güte, da kein mechanisches Übertragungselement vorhanden ist.
Blick auf die Eigenschwingungen des Linearantriebs
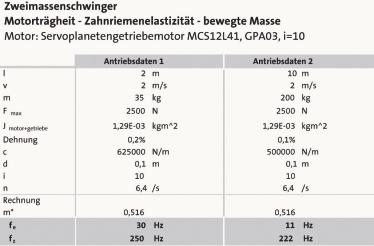
Im Linearantrieb führt der Zahnriemen zur Elastizität zwischen Motor und Last. Im Zusammenspiel mit der bewegten Masse der Arbeitsmaschine entsteht ein Zweimassenschwinger mit relativ niedriger Eigenfrequenz, der durch den Motor zu Eigenschwingungen angeregt werden kann.
Der Zusammenhang wird durch zwei Beispiele deutlich: Wie in Tabelle 1 dargestellt, liegt die Eigenfrequenz bei einem Zahnriemenantrieb mit Servoplanetengetriebemotor und einer Länge von 2 m bei 30 Hz. Eine Länge von 10 m reduziert die Eigenfrequenz auf 11 Hz. Diese Eigenfrequenzen sind allerdings nicht konstant, sondern hängen von der aktuellen Position der bewegten Masse ab. Diese Eigenfrequenzen begrenzen die erreichbare Verstärkung des Antriebs. Damit reagiert das Antriebssystem langsamer auf Sollwertabweichungen. Mit einer klassischen Sollwertvorgabe und nachfolgenden Regelung der Istwerte auf die Sollwerte würde die reduzierte Verstärkung zu einem Verlust an Dynamik führen. Auch führen Sollwertsprünge zur Anregung der Eigenfrequenzen des Antriebs, so dass deutliche Schwingungen des Antriebs die Folge sein können. Damit trotz der niedrigen Eigenfrequenzen eine hohe Dynamik möglich ist und die Eigenfrequenzen nicht angeregt werden, wendet Lenze in den Servo-Umrichter-Reihen ECS und L-force Servo Drives 9400 eine gezielte Vorsteuerung an.
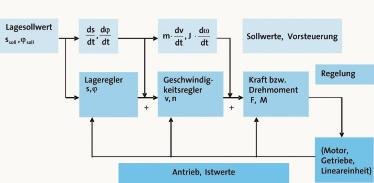
Realisierung der Vorsteuerung
Der eigentliche Sollwert ist die Position, die der Antrieb anfahren soll. Dieser Wert wird auf den Lageregler gegeben und mit der Ist-Position verglichen. Die Abweichung zwischen Soll-Position und Ist-Position wird vom Lageregler verstärkt und als Drehzahlsollwert ausgegeben. Wird parallel auch die Änderung der Soll-Position ermittelt, lässt sich diese in einen Drehzahlsollwert umrechnen. Diese beiden Werte werden addiert und bilden zusammen den Drehzahlsollwert für den Drehzahlregler. Durch dieses Vorgehen ist es möglich, auch bei kleinen Reglerverstärkungen ein korrektes Drehzahlsignal zu erzeugen, so dass der Antrieb schnell reagiert. Mit dem Drehmoment wird genauso verfahren. Durch diese gezielte Vorsteuerung von Drehzahl und Drehmoment neben der Positionsvorgabe wird mit den Servoreglern ECS und L-force Servo Drives 9400 der Betrieb von schwingungsfähigen Antrieben mit hoher Dynamik ermöglicht.
Unsere Whitepaper-Empfehlung

Whitepaper Sealing Plugs: So verschließen Sie Hilfsbohrungen in Motoren, Pumpen, Hydraulikaggregaten oder Werkzeugmaschinen dauerhaft und absolut dicht. Leichte Installation, niedrige Kosten. Für Betriebsdrücke bis 500 bar.
Teilen:








{kind=link}