



Wie können Automatisierer KI-Modelle intuitiv entwickeln und in die Steuerung integrieren? Wie lässt sich überschüssige Energie im Antriebsverbund wieder...
Inhaltsverzeichnis
1. PC-based Control bietet Durchgängigkeit und Offenheit
2. Steuerungstechnik als Innovationsfaktor
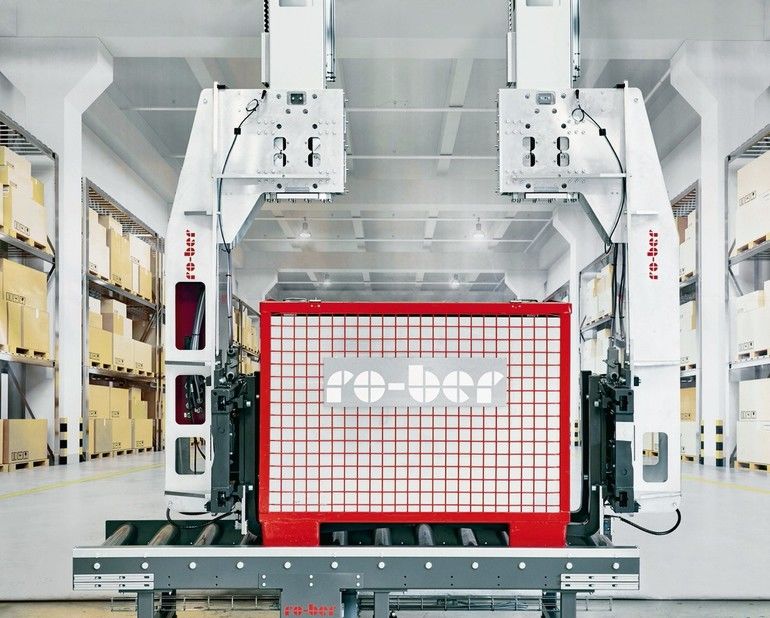
Die Robotersysteme der Ro-Ber Industrieroboter GmbH, Kamen, kommen beim Palettieren, Depalettieren und Kommissionieren, beim Lagern und Puffern sowie für die Verkettung von Maschinen und Anlagen zum Einsatz. Dabei steht auch die entsprechende Greiftechnik im Mittelpunkt. Das Unternehmen entwickelt und fertigt auch selbst zum Beispiel Klemm-, Gabel- und Vakuumgreifer für das Handling der unterschiedlichen Produkte sowohl im Einzel-, Mehrfach- und vor allem im Lagengriff. So vielfältig wie die Produkte sind auch die Einsatzbereiche – Automotive, Food & Beverage ebenso wie die Logistikbranche für Lebensmitteleinzel- und -großhandel, Pharma- und Chemieindustrie. Bei einem aktuellen Intralogistikprojekt werden Großladungsträger, wie Gitterboxen, unterschiedlicher Größe und Beschaffenheit mit Gewichten bis 1500 kg über eine Fördertechnik angeliefert. Diese Behälter müssen anschließend durch das Robotersystem erkannt und auf Routenzüge umgesetzt werden. Über die Routenzüge erfolgt schlussendlich die Produktionsversorgung. Bei der Realisierung der Handhabungstechnik waren laut Geschäftsführer Elmar Stöve mehrere Herausforderungen zu beachten: „Ro-Ber verfügte bisher über keinen Roboter, mit dem sich solch hohe Traglasten bewältigen lassen. Weiterhin weisen die zu handhabenden Ladungsträger unter anderem eine große Grundfläche auf, sodass diese von zwei Seiten aufzunehmen sind. Aus diesen Gründen waren sowohl das Roboter- als auch das Greifsystem neu zu konstruieren. Beim Roboter wurde konsequent darauf geachtet, dass sich Module aus unserem bisherigen Baukastensystem weiter verwenden ließen. Das neue Greifsystem besteht – ähnlich einem Gabelstapler – aus zwei Paar Gabelzinken, die servogesteuert zueinander verstellt werden können. Dabei sind in die Ethercat-basierte Antriebstechnik auch einige per CAN angesteuerte Achsen eingebunden, was durch die Offenheit von PC-based Control von Beckhoff auch hinsichtlich des Kommunikationssystems allerdings problemlos, quasi per Plug-and-Play, möglich war.“ Insgesamt umfasst das neuentwickelte Robotersystem fünf Achsen: eine horizontale X-Achse sowie zwei weitere horizontale Y-Achsen mit zwei vertikalen Z-Achsen. Die Y-/Z-Achsen können sowohl einzeln als auch im Achsverbund bewegt und damit dynamisch in den Achsverbund ein- bzw. ausgekoppelt werden. Die Verfahrgeschwindigkeiten liegen je nach Achse bei bis zu 4 m/s und die Beschleunigungen bei maximal 2,5 m/s².
PC-based Control bietet Durchgängigkeit und Offenheit
Der Handlingspezialist setzt schon seit vielen Jahren die Busklemmen von Beckhoff ein, was – so Stöve – ein guter Ausgangspunkt für den Wechsel zu PC-based Control insgesamt gewesen sei. Nach einer entsprechenden Marktrecherche fiel die Entscheidung zugunsten der PC-basierten Steuerungstechnik aus Verl, denn sie vereint alle von den Kamenern verwendeten Technologien in einem System. Dazu zählen neben der klassischen SPS-Funktionalität auch CNC- und Safety-Funktionen. Die entsprechend durchgängige Parametrierung und Programmierung mit Twincat als leistungsfähigem Werkzeug macht die Entwicklung überschaubarer und einfacher. Da sich das Unternehmen mit seinen Anlagen im intralogistischen Umfeld bewegt, ist zudem die Kommunikation mit übergeordneten Materialfluss- oder Lagerverwaltungssystemen entscheidend. Hier bietet die offene PC-basierte Steuerungstechnik des Automatisierungsspezialisten viele Vorteile. Weiterer Grund für den Umstieg war die leistungsfähige Kommunikationstechnik. Denn mit Ethercat steht einerseits ein schnelles Bussystem zur Verfügung und andererseits kann man damit komplexe Topologien leicht realisieren. Hinzu kam ein weiterer Aspekt. Stöve: „Einerseits war uns der Systemgedanke sehr wichtig, andererseits aber vor allem auch die Offenheit des Steuerungssystems. PC-based Control deckt mit dem Ethercat-Klemmen-Portfolio einen riesigen Bereich ab, sodass für fast alle elektrischen oder kommunikationstechnischen Aufgabenstellungen eine oder sogar mehrere I/O-Produkte zur Auswahl stehen. Vor allem bei den elektromechanischen Komponenten, wie den Pneumatik-Komponenten, war es uns aber auch wichtig, dass Fremdgeräte über Ethercat ebenso wie über CAN, Profinet usw. einfach zu integrieren sind. Zudem hat Beckhoff uns von Anfang an stark unterstützt und auch neue, für unsere Applikation wichtige Funktionalitäten in Twincat integriert.“
Steuerungstechnik als Innovationsfaktor
Mit den Twinsafe-Klemmen lässt sich auch die Sicherheitstechnik nahtlos in den I/O-Verbund integrieren, wie Stöve weiter erläutert: „Auf diese Weise konnten wir einerseits den Verdrahtungsaufwand an den Anlagen verringern und andererseits die Flexibilität deutlich steigern. Für den Kunden schlägt sich diese Flexibilität in einer höheren Verfügbarkeit des Gesamtsystems nieder. Ein weiterer positiver Aspekt hat sich durch die kompakte Antriebstechnik mit den Servoverstärkern EL72xx im Klemmenformat ergeben. Denn die zahlreichen in den Gabel- und Lagengreifern realisierten Stell- und Greiffunktionen lassen sich damit viel einfacher realisieren und auch neue Greiferkonzepte bei geringem Verkabelungsaufwand entwickeln. Bei dem aktuellen Projekt hat PC-based Control uns insgesamt die Möglichkeit eröffnet, das komplett neue Robotersystem Twin-Gantry zu entwickeln. Hier können sich zwei Achssysteme einerseits unabhängig voneinander bewegen, andererseits nach unabhängiger Fahrt aber auch jederzeit in den Interpolationsverbund aufgenommen werden – mit allen Funktionalitäten wie das taktzeitrelevante räumliche Überschleifen. Diese Neuentwicklung ermöglicht den Einsatz der Roboter nun auch für das Handling von Langgut.“
Für die Visualisierung setzt das Unternehmen auf Twincat HMI, wie Stöve ergänzt: „Twincat HMI ermöglicht als webbasiertes System die Darstellung in jedem Webbrowser auf den unterschiedlichsten Plattformen. Aufgrund der Verwendung des HTML5-Standards ist es zudem ein zukunftssicheres und offenes System. Weiterhin stellt Twincat HMI eine komplette Funktionsbibliothek zur Verfügung, um das eigene HMI optimal zu gestalten und zu generieren. Dies ermöglicht uns als Maschinenlieferant einerseits eine HMI-Standardisierung und andererseits aber auch die individuelle Gestaltung für dedizierte Anwendungsfälle.“ Als Hardwarebasis des HMI dient das Multitouch-Control-Panel CP2921, das sich mit seinem 21,5-Zoll-Display laut Stöve sehr gut eignet, um ausreichend viele Informationen sowohl textuell als auch grafisch übersichtlich darzustellen: „Aufgrund der heutigen Applikationen, die man zum Beispiel vom Smartphone her kennt, war es uns wichtig, die Bedienerführung an diese Funktionen anzupassen, um so eine hohe Akzeptanz beim Bedienpersonal zu erreichen. Die Multitouch-Fähigkeit, unter anderem für Zoom-Funktionen, ist dafür sehr wichtig.“ Der eingesetzte Embedded-PC CX2040 habe sich ebenfalls für die erforderlichen CNC-Applikationen bewährt und sei dabei bisher noch nicht an seine Leistungsgrenzen gestoßen. jg
Details zu PC-based Control von Beckhoff für die Lager- und Distributionslogistik:
Kontakt:
Beckhoff Automation GmbH & Co. KG
Hülshorstweg 20
33415 Verl
Tel.: + 49 5246 963–0
E-Mail: info@beckhoff.de
Website: www.beckhoff.de







{kind=link}