

Wie können Automatisierer KI-Modelle intuitiv entwickeln und in die Steuerung integrieren? Wie lässt sich überschüssige Energie im Antriebsverbund wieder...
KEM Konstruktion: Die Kollaborative Robotik hat sich in den letzten Jahren sehr schnell weiterentwickelt. Wie ist der aktuelle Stand in Sachen Normen sowie bei Handlungsempfehlungen?
Jochen Vetter: Die Sicherheitsanforderungen speziell zu kollaborierenden Robotersystemen nach der ISO 10218-1 und ISO 10218-2 sind nach wie vor noch nicht umfassend beschrieben. Im Rahmen der Technischen Spezifikation ISO TS 15066 wurden die Sicherheitsanforderungen bereits weiterentwickelt. Diese Inhalte fließen teilweise in die geplante Überarbeitung der beiden Normen ein oder werden dort ergänzt. Geplant ist, die ISO 10218-1 und 10218-2 bis zum Mai 2021 in einer neuen Fassung zu veröffentlichen. Experten von Pilz sind Mitglied des entsprechenden internationalen technischen Komitees ISO/TC 299 Robotics, Arbeitsgruppe WG 3 Industrial Safety.
KEM Konstruktion: Inwiefern gibt es Verbesserungspotenzial?
Vetter: Die Liste der Themen, die bis zum Abschluss der Überarbeitung diskutiert werden, ist tatsächlich lang. Dazu gehören die Erstellung einer Übersicht mit allen relevanten Sicherheitsfunktionen, die Festlegung der Minimalanforderungen nach ISO 13849 / IEC 62061 an die jeweiligen Sicherheitsfunktionen, die Ausarbeitung von genaueren Sicherheitsanforderungen im Bereich Bremsen sowie exaktere Anforderungen für Applikationen in den Kollaborationsarten nach ISO TS 15066. Weitere Punkte auf der Aufgaben-Liste sind die Ausarbeitung von Sicherheitsanforderungen für mobile Roboter, die Übernahme und Detaillierung der Sicherheitsanforderungen an Greifer/Greifersysteme, basierend auf dem Technischen Report ISO/TR 20218-1 und auch die Übernahme und Überarbeitung der biomechanischen Grenzwerte zur Leistungs- und Kraftbegrenzung sowie für quasistatische und transiente Kontakte aus der ISO TS 15066.
Ein großes Manko ist nach meiner Ansicht, dass in der TS zwar festgelegt ist, dass die Grenzwerte einzuhalten sind und welche Grenzwerte für welche Körperregionen gelten. Was jedoch nicht beschrieben ist, ist die Art der Messung. Hier fehlen momentan Standards um, unabhängig davon wer die Validierung durchführt, vergleichbare Ergebnisse zu erhalten.
KEM Konstruktion: Was sollten Anwender bei der Erstellung von EG-Konformitätserklärungen oder der Vergabe von CE-Kennzeichen beachten?
Vetter: Grundsätzlich ist der Roboter gemäß der Maschinenrichtlinie an sich nur eine unvollständige Maschine; erst durch Greifer oder das für die jeweilige Applikation notwendige Werkzeug erhält der Roboter einen bestimmten Zweck und muss als vollständige Maschine betrachtet werden. Der Integrator oder Anwender wird damit zum Hersteller der Maschine und ist für die CE-Kennzeichnung inklusive sicherheitstechnischer Überprüfung verantwortlich.
Sobald eine erste Idee der Applikation besteht, gibt es auch eine Diskussionsgrundlage für das Sicherheitskonzept und man kann bereits mit einer Risikobeurteilung beginnen. Wenn diese Überlegungen erst während oder nach dem Aufbau der Roboterapplikation angestellt werden, sind größere Umbaumaßnahmen häufig die Konsequenz. Die Praxis zeigt: Je früher das Thema Sicherheit berücksichtigt wird, desto mehr entspricht die umgesetzte MRK-Applikation dem ursprünglichen Konzept.
KEM Konstruktion: Pilz bietet auch ein eigenes Seminar zur sicheren Mensch-Roboter-Kollaboration an. Können Sie uns einen kurzen Einblick in typische Probleme geben?
Vetter: Mit diesem Seminar treffen wir tatsächlich einen Nerv. Die Teilnehmer suchen den Austausch mit unseren Experten aus der Praxis und wollen Informationen aus erster Hand haben.
Die Herausforderung bei schutzzaunlosen Roboterapplikationen besteht darin, dass sich die Grenzen zwischen den beiden Arbeitsbereichen von Mensch und Maschine auflösen. Zusätzlich zu den Gefahren, die vom Roboter ausgehen, müssen die Bewegungen des Menschen berücksichtigt werden. Diese sind jedoch nicht immer kalkulierbar. Auch wenn Roboter über Sicherheitsfunktionen verfügen und die Produktionstechnik über große Erfahrung bei der Gestaltung von Arbeitsplätzen verfügt: Bei der Umsetzung von MRK-Applikationen tauchen immer neue Fragestellungen auf, insbesondere wenn diese nach Methode 4 (siehe Plus-Kasten) umgesetzt wird und damit Kollisionen – gewollt oder nicht – möglich sind. Dabei spielt nicht zuletzt die Art der Kollision eine Rolle. Grundsätzlich beobachten wir bei den Beweggründen, warum eine MRK-Applikation realisiert werden soll, einen Trend dazu, dass es heute immer stärker darum geht, den Menschen durch Roboter tatsächlich zu entlasten.
KEM Konstruktion: Abschließend noch eine Frage zur Umsetzung von sicheren Roboter-Anwendungen. Welche Möglichkeiten bietet Pilz hier Anwendern?
Vetter: Pilz unterstützt Anwender mit einem auf die einzelnen Lebensphasen eines Robotersystems abgestimmten Dienstleistungsangebot: Von der Applikationsanalyse über die Risikobeurteilung gemäß EN ISO 12100 bis hin zur CE-Kennzeichnung. Für die spezielle Kraft- und Druckmessung haben wir beispielsweise ein eigenes Kollisionsmess-Set PRMS entwickelt. Das mit Federn, Kollisionselementen und entsprechender Sensorik ausgestattete System misst die auf den menschlichen Körper einwirkenden Kräfte und Druck exakt und vergleicht sie mit den Grenzwerten gemäß ISO/TS 15066.
Bei der technischen Umsetzung von Roboterapplikationen kommt der sicheren Sensorik eine Schlüsselrolle zu: Um allen Anwendungen in Sachen Sicherheit gerecht zu werden, umfasst unser Sensorik-Portfolio zum einen Sicherheitsschalter zur Überwachung von Positionen und trennende Schutzeinrichtungen. Für die Flächen- und Raumüberwachung eignen sich optische Sensoren, wie Lichtschranken oder Kamerasysteme, optimal und großes Potenzial bei der Überwachung von Flächen bieten taktilen Sensoren, wie Sicherheitsschaltmatten.
Service Robotik Module von Pilz für den Einsatz im industriellen und nicht-industriellen Umfeld
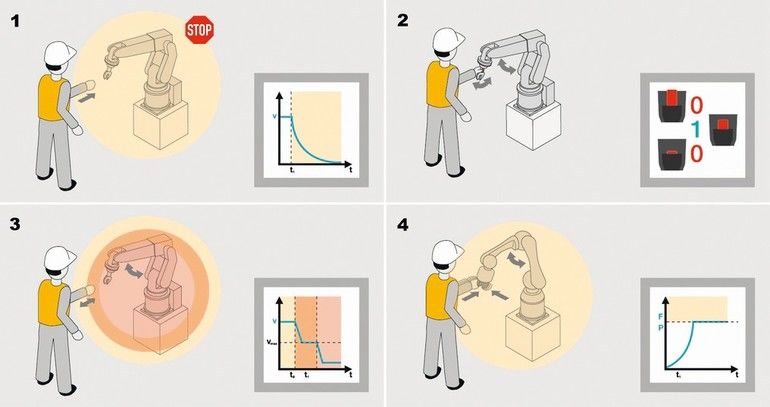
Die vier Kollaborationsarten
In der Technischen Spezifikation ISO/TS 15066 „Robots and Robotic Devices – Collaborative industrial robots“ sind vier Kollaborationsarten als Schutzprinzipien beschrieben:
- Sicherheitsbewerteter überwachter Halt (Methode 1): Der Mensch hat nur Zugang zum stillstehenden Roboter. Eine Kollision ist damit ausgeschlossen.
- Handführung (Methode 2): Der Mensch hat nur Zugang zum stillstehenden Roboter und der Mensch führt den Roboter manuell. Eine Kollision ist damit ausgeschlossen.
- Geschwindigkeits- und Abstandsüberwachung (Methode 3): Der Mensch hat während des Betriebs Zugang zum Kollaborationsraum, seine Sicherheit wird durch den Abstand zum Roboter gewährleistet: Ist der Abstand zu gering, wird ein Sicherheitshalt ausgelöst. Eine Kollision ist damit ausgeschlossen.
- Leistungs- und Kraftbegrenzung (Methode 4): Hier hat der Mensch ebenfalls Zugang zum Kollaborationsraum, während der Roboter sich bewegt. Ein Kontakt zwischen Mensch und Roboter – beabsichtigt oder nicht – ist möglich.
Hier finden Sie mehr über:








{kind=link}