


Um weitere Einsatzfelder zu erschließen, muss die Positioniergenauigkeit von Robotern steigen. Treiber dieser Entwicklung ist die Luft- und Raumfahrtindustrie. Denn hier müssen große Bauteile mit hoher Genauigkeit bearbeitet werden. Werkzeugmaschinen würden die dafür geforderten Genauigkeiten zwar spielend erreichen, sind aber entweder, was Einsatzort und Bearbeitungsraum betrifft, zu unflexibel oder als Sondermaschinen zu teuer. Ein Roboter dagegen kann selbst an gewaltigen Teilen wie einem Flugzeugrumpf problemlos jede beliebige Stelle erreichen und dort Bohrungen setzen und Fräsbearbeitungen durchführen.
Viele Einflussgrößen verderben die Genauigkeit
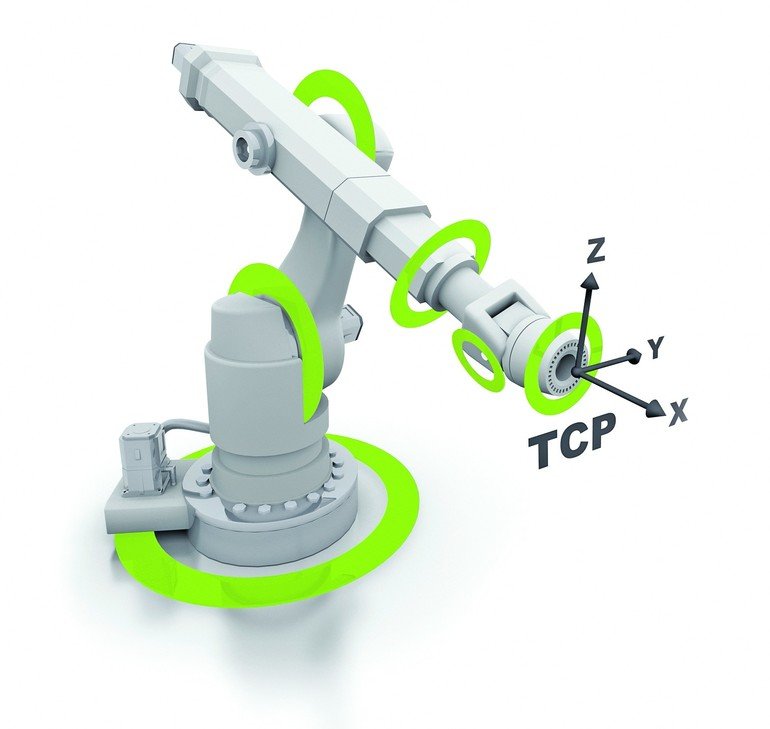
Für diese Anwendungen muss der Tool Center Point, also das Werkzeug am Ende des Roboterarms, mit ausreichender Genauigkeit positioniert und geführt werden. Damit stoßen klassische Industrieroboter an ihre Grenzen. Zu viele Faktoren sorgen für Abweichungen:
- Um die gewünschte Beweglichkeit zu erreichen, sind Roboter mit serieller Kinematik erforderlich, zum Beispiel Gelenkarmroboter mit sechs Achsen.
- Jede dieser Achsen treibt ein Servomotor über ein Getriebe an. Nulllagenfehler, Umkehrspiel und Gelenkelastizitäten sind Hauptverursacher von Ungenauigkeiten.
- Krafteinwirkung und dynamische Effekte während des Bearbeitungsprozesses wirken auf die Steifigkeit der Robotermechanik und gehen zu Lasten der absoluten Positionsgenauigkeit.
Das mehrfache Anfahren des Tool Center Points auf eine bestimmte Position ist aufgrund fortschrittlicher Kalibriermethoden bereits bis auf wenige Hundertstel Millimeter genau möglich. Je nach Hersteller liegt die Wiederholgenauigkeit von Gelenkarmrobotern nach ISO 9283 bei ±0,1 mm und besser. Der Wiederholgenauigkeit gegenüber ist die erreichbare Absolutgenauigkeit innerhalb des Roboterkoordinatensystems um den Faktor 10 schlechter. In der Praxis erreichen heute Gelenkarmroboter – je nach Ausführung, maximaler Reichweite und Traglast – eine absolute Positionsgenauigkeit von ±1 mm. Dies ist unzureichend für die Genauigkeitsanforderungen, die eine Branche wie die Luftfahrtindustrie stellt. Aber die Roboterhersteller haben reagiert.
Schritt 1: Hochdynamische Motorregelung
Das Motorfeedback der Servomotoren an den Achsen der Roboter übernehmen weiterhin klassische Drehgeber. Da die Servomotoren eine hohe Regeldynamik erfordern, können beispielsweise robuste induktive Drehgeber wie die Baureihen ECI 1100 und 1300 oder Multiturn-Drehgeber der Baureihen EQI 1100 und 1300 von Heidenhain eingesetzt werden. Sie bieten eine hohe Regelgüte und Systemgenauigkeit. Außerdem sind sie besonders stark mit Vibrationen belastbar. Da die Drehgeber über die rein serielle Endat-Schnittstelle verfügen, können auch stark elektromagnetisch belastete Einsatzbereiche die Qualität und Sicherheit der Datenübertragung nicht beeinträchtigen. Diese induktiven Drehgeber unterstützen den Sicherheitsintegritätslevel SIL 2, Kategorie 3 PL d. Mit Zusatzmaßnahmen in der Steuerung erreichen sie sogar SIL 3 beziehungsweise Kategorie 4 PL e. Ein zusätzlicher Vorteil ist in diesem Zusammenhang der mechanische Fehlerausschluss, den Heidenhain gegen das Lösen der Wellen- und Statoranbindung realisiert hat. Mit diesem Sicherheitspaket können die induktiven Drehgeber auch in Systemen für die Mensch-Roboter-Kollaboration eingesetzt werden.
Schritt 2: Secondary Encoders für die hochgenaue Positionsmessung
Eine signifikante Verbesserung der absoluten Positionsgenauigkeit erreichen die Roboterhersteller durch den Einsatz zusätzlicher hochgenauer Winkelmessgeräte oder Drehgeber an jeder Roboterachse. Diese sogenannten Secondary Encoders, jeweils montiert nach dem Getriebe, erfassen die tatsächliche Position jedes Robotergelenks. So berücksichtigen sie auf jeden Fall den Nulllagenfehler und das Umkehrspiel. Außerdem messen sie an jeder Achse des Roboterarms die rückwirkenden Kräfte aus der Bearbeitung. Das führt in Summe zu einer Verbesserung der absoluten Positionsgenauigkeit am Tool Center Point um 70 bis 80 %. Für diese Anwendungen eignen sich modulare Winkelmessgeräte wie das Heidenhain ECA 4000 mit optischer Abtastung, der Drehgeber Heidenhain ECI 4000 mit induktiver Abtastung oder das Winkelmesssystem AMO WMR. Durch ihren modularen Aufbau mit Teilungstrommel beziehungsweise -band und separater Abtasteinheit eignen sie sich für große Wellendurchmesser ebenso wie für schwierige Einbausituationen, wie sie in Robotern aufgrund der beengten Platzverhältnisse anzutreffen sind. Ihre Signalgüte ist deutlich besser als bei den Drehgebern am Servomotor, so dass sie wesentlich genauere Positionswerte liefern – auch bei hochdynamischen Bewegungen.
Schritt 3: Genaue Positionsmessung bei verfahrbaren Robotern
Um bei extrem großen oder langen Bauteilen wie einem Flugzeugrumpf oder bei der Herstellung von großen Verbundfaserbauteilen alle Bearbeitungspositionen zu erreichen, können Roboter auf Linearachsen entlang der Bauteile verfahren werden. Für die hochgenaue Positionierung der Roboter über die Linearantriebe stehen gekapselte Heidenhain-Längenmessgeräte für Messlängen bis zu 30 m zur Verfügung. Die Positionsmessung mit einem Längenmessgerät kompensiert thermische Fehler und weitere Einflüsse der Vorschubmechanik, die eine herkömmliche Positionsermittlung anhand der Steigung des Kugelgewindetriebs und der Winkelposition des Motordrehgebers nicht erfassen kann.
Fazit: Hochgenaue Positionsmessung steigert die Genauigkeit am Tool Center Point
Zusätzliche Messgeräte an allen Achsen eines Roboters und die Positionierung des Roboters zum Werkstück über Längenmessgeräte ermöglichen eine Genauigkeit am Tool Center Point, die eine positionsgenaue Bearbeitung und Handhabung von Teilen mit entsprechend ausgestatteten Industrierobotern erlaubt. Winkel- und Längenmessgeräte von Heidenhain und AMO bieten nicht nur die erforderliche Systemgenauigkeit, sondern auch die notwendige Flexibilität für den Einbau in die komplexe und kompakte Robotermechanik. Ihre Eignung für sicherheitsgerichtete Anwendungen erlaubt es zudem, Systeme für die Mensch-Roboter-Kollaboration zu realisieren. jke
Weitere Details zu den Drehgebern von Heidenhain:
Messe SPS IPC Drives 2017:
Halle 7, Stand 190









{kind=link}