
In der Landwirtschaft ist es üblich, große Nutzflächen mit mehreren Maschinen gleichzeitig zu bearbeiten, um die Produktivität zu steigern. In einem Forschungsprojekt wurde nun ein Arbeitsverbund für Traktoren teilweise automatisiert: Ein Fahrzeug übernimmt bemannt die Führung, der zweite Traktor folgt unbemannt und vollautomatisch.
Exklusiv in KEM Die Autoren: Bernhard Jahnke, Prof. Dr. Marcus Geimer, beide KIT, Karlsruhe; Dr. Patrick O. Noack, Geo-konzept, Adelschlag; Georg Happich, AGCO, Marktoberdorf
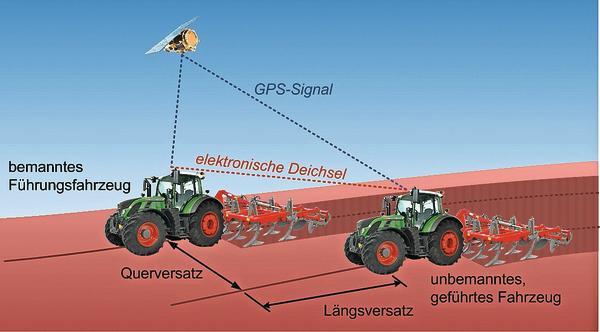
Die Teilautomatisierung eines Arbeitsgespanns aus Traktoren war Ziel eines von 2007 bis 2010 durchgeführten Forschungsprojekts am Karlsruher Institut für Technologie. Mit definiertem Versatz in Längs- und Querrichtung folgt ein unbemannter der Spur eines bemannten Traktors und führt dabei den gleichen Arbeitsprozess durch – diese Idee wurde am Lehrstuhl für Mobile Arbeitsmaschinen (Mobima) gemeinsam mit den Projektpartnern Geo-konzept und AGCO Fendt in ein System umgesetzt, mit dem die Produktivität moderner landwirtschaftlicher Unternehmen weiter gesteigert werden soll. Verbunden per Datenfunk und ausgestattet mit hochgenauen GPS-Empfängern konnten bereits die im Projekt ausgerüsteten Prototypen auf dem Acker die Arbeit aufnehmen.
Unbemannte Großtraktoren im Arbeitsverbund einsetzen
Leistungsstarke Maschinen bedeuten eine hohe Produktivität. Diese Aussage ist sicherlich nicht allgemeingültig, in der Landwirtschaft aber, wenn es um die Bearbeitung großer Schläge geht, durchaus zutreffend. Der Trend, der sich langfristig betrachtet seit Beginn des Ackerbaus gehalten hat, lässt die Entwickler heute immer häufiger an Grenzen stoßen. So haben auch Traktoren Dimensionen und Massen erreicht, die den gesetzlichen Einschränkungen im öffentlichen Straßenverkehr oftmals sehr nahe kommen. Eine Leistungssteigerung und damit eine gesteigerte Flächenleistung auf dem Acker kann jedoch nicht nur durch einen Zuwachs der installierten Motorleistung erreicht werden, sondern ebenso durch eine höhere Anzahl zeitgleich arbeitender Maschinen. Um zudem wirtschaftlich effizienter zu produzieren, liegt es nahe, diesen Arbeitsverbund teilweise zu automatisieren.
Was technologisch schon viele Jahre möglich erschien, jedoch auf Herstellerseite für viel Skepsis gesorgt hat, konnte nun als Projektergebnis vorgestellt werden. Ist die elektronische Deichsel aktiv, sorgt ein umfassendes Sicherheitskonzept für den gefahrenlosen Einsatz unbemannter Großtraktoren im Arbeitsverbund auf dem Acker. Dem Landwirt steht somit auf einen Schlag nahezu die doppelte Leistung zur Verfügung.
Datenfunk und GPS statt Kabel und Deichsel
Das Wesen einer Deichsel ist die Herstellung einer definierten Verbindung und damit der Zwangsführung eines Fahrzeugs durch ein anderes. Dieses Konzept liegt auch der elektronischen Deichsel für mobile Arbeitsmaschinen zugrunde. Hier erfolgt die Zwangsführung jedoch nicht auf mechanische, sondern auf elektronische Weise. Ausgestattet mit hochgenauen RTK-GPS-Empfängern und verbunden durch eine Datenfunkverbindung tauschen beide Fahrzeuge Informationen über Positionen, Geschwindigkeiten, Einstellungen der Anbaugeräte und wichtige Maschinenparameter aus. Während der bemannte Führungstraktor seine Positionsdaten sendet, errechnet das geführte Fahrzeug aus der Beobachtung der eigenen letzten Wegpunkte und der vom versetzt vorausfahrenden Führungsfahrzeug vorgegebenen Fahrspur seine eigene Soll-Trajektorie. Aus den zugehörigen Krümmungswerten kann der Lenkwinkel ermittelt und auf dem Fahrzeug eingestellt werden. Weicht der tatsächliche Versatz in Längsrichtung von dem vorgegebenen Maß ab, kann dies durch eine Variation der Geschwindigkeit des geführten Traktors korrigiert werden. Somit wirkt je ein Regelkreis für Längs- und Querdynamik des geführten Fahrzeugs.
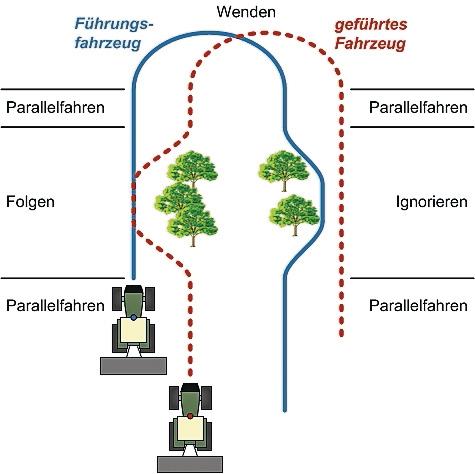
Nachdem bei Systemstart der Versatz des geführten Fahrzeugs in Längs- und Querrichtung definiert wurde, erhält der Fahrer die Möglichkeit, den Betriebszustand des geführten Fahrzeuges einzusehen und das Verhalten des geführten Fahrzeugs durch die Wahl verschiedener Fahrmodi festzulegen, um das System ideal auf die Randbedingungen auf dem Feld und die aktuelle Arbeitsfunktion einzustellen:
Modus „Parallelfahren“:
- Das geführte Fahrzeug folgt der Spur des Führungsfahrzeuges mit definiertem Versatz
- Standard-Modus
Modus „Folgen“:
Das geführte Fahrzeug steuert in die Fahrspur des Führungsfahrzeuges und kann auf diese Weise Hindernissen ausweichen
Modus „Ignorieren“:
- Das geführte Fahrzeug hält an und wartet auf Deaktivierung dieses Modus
- Ist dies erfolgt, schließt das geführte Fahrzeug in direkter Linie wieder auf
Modus „Wenden“:
- Als Manöver am Vorgewende hält der geführte Traktor an und hebt das Arbeitsgerät aus
- Hat das Führungsfahrzeug das Wendemanöver abgeschlossen, folgt auch das geführte
Die Software-Architektur der elektronischen Deichsel ist dabei in drei Module gegliedert: Ein Kommunikationsmodul dient der Herstellung und Aufrechterhaltung der drahtlosen Funkverbindung zwischen den Traktoren. Die Datenqualität wird direkt in den Funkmodems und Controllern überwacht. Ein Sicherheitsmodul ist für die Verschlüsselung der Daten zur eindeutigen Zuordnung eingebundener Fahrzeuge verantwortlich, warnt bei Kollisionsgefahr, überwacht den GPS-Empfang und kann nötigenfalls einen Notstopp auslösen. Das Pfadplanungs- und Regelmodul berechnet die Spur und Geschwindigkeit des unbemannten Traktors, erfasst auf dem führenden Traktor Maschineneinstellungen und stellt diese auf dem geführten ein.
Ein Prototyp mit diesen Eigenschaften konnte bereits zu Ende des Forschungsprojektes in Betrieb genommen werden. Die Relevanz und Bedeutung dieser Thematik konnte mit der Auszeichnung des auf den Ergebnissen des Forschungsprojektes EDA aufbauenden Produktes Fendt Guideconnect mit der Goldmedaille der Agritechnica 2011 eindrucksvoll unter Beweis gestellt werden.
Ausblick: intelligente elektronische Deichsel
Das im Forschungsprojekt entwickelte Konzept der elektronischen Deichsel besticht durch seinen einfachen, intuitiven und sicherheitsorientierten Aufbau. Dennoch geht nun die Verantwortung für beide Fahrzeuge auf den Fahrer über. Die Arbeitsbelastung, nun den eigenen und zusätzlich den in ungünstigem Blickwinkel folgenden Traktor zu bedienen und zu überwachen, wächst für den Landwirt zwangsläufig deutlich an. Eine Möglichkeit, das hieraus resultierende erhöhte Sicherheitsrisiko zu reduzieren, besteht darin, den unbemannten Traktor durch den Einsatz von Geoinformationen und Umfeldsensorik mit einer automatischen Hinderniserkennung auszustatten. Werden Hindernisse frühzeitig erkannt, ist es zudem möglich, für den geführten Traktor Ausweichmanöver zu berechnen. Der Fahrer könnte somit nicht nur in seiner Überwachungsfunktion entlastet, sondern zusätzlich in der Bedienung und Steuerung des Gesamtgespanns unterstützt werden.
KIT, Tel.: 0721 608-48642, E-Mail: bernhard.jahnke@ kit.edu
Das Forschungsprojekt wurde von 2007 bis 2010 mit Fördermitteln des BMELV unter der Projektträgerschaft der BLE in Kooperation mit AGCO Fendt und Geo-konzept durchgeführt. Dem BLE und dem BMELV gilt für die Unterstützung ein besonderer Dank des Projektteams.
Teilen:







{kind=link}